HAVI
Wie kommuniziert ein Fahrzeug im Straßenverkehr mit Menschen, wenn sich kein Fahrer im Fahrzeug befindet?
Das Projekt HAVI (Human Autonomous Vehicle Interface) schlägt Prinzipien vor, wie die Kommunikation von autonomen Fahrzeugen ablaufen kann.

Herausforderung
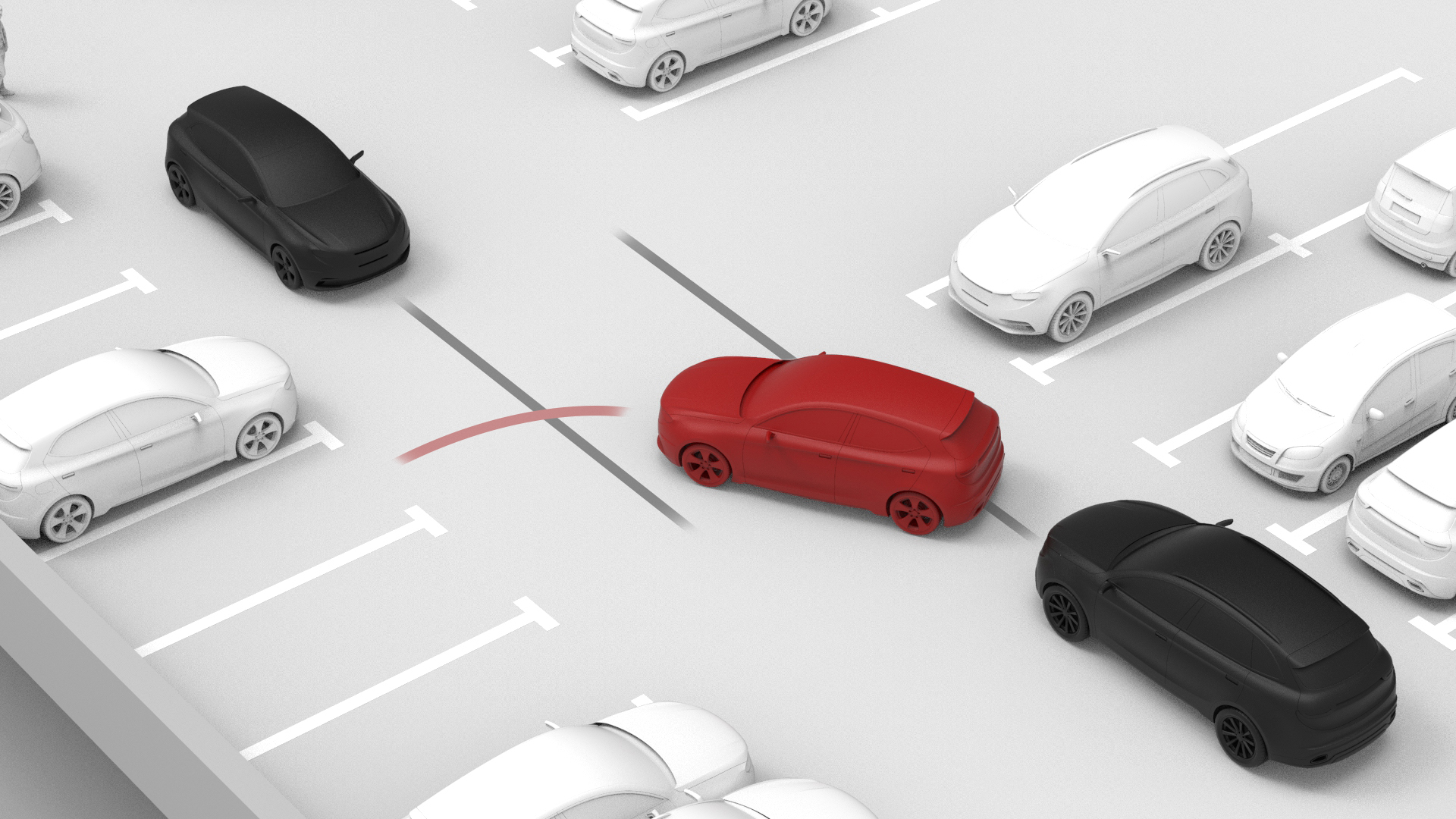
Zusammen mit der Robert Bosch GmbH haben wir beispielhaft an dem Projekt Automated Valet Parking (AVP) diese Masterthesis erarbeitet. Im Kern wird hierbei untersucht, wie autonome Fahrzeuge im Kontext eines Parkhauses mit unterschiedlichen Verkehrsteilnehmern kommuniziert. Das Pilotprojekt AVP ist im Stuttgarter Mederces-Benz Museum aufgebaut und dient zu Demonstationszwecken der entwickelten Technologie. Kunden von Mercedes-Benz sollen ihr Fahrzeug auf einer definierten Parkfläche abstellen können und via App das Fahrzeug autonom parken lassen. Kommt der Kunde zurück, wird das Fahrzeug wieder an einen festgelegten Parkplatz geliefert.
Auf dem Weg, welches das Fahrzeug selbstständig zurücklegt, trifft es auf unterschiedliche Verkehrsteilnehmer wie Fußgänger und andere Autofahrer. Wir haben untersucht, welche Kommunikation hierbei das autonome Fahrzeug mit den Verkehrsteilnehmern ausüben soll, damit alle Personen wissen, wie sie sich verhalten sollen und allgemein autonome Fahrzeuge mehr akzeptiert werden im Alltag.

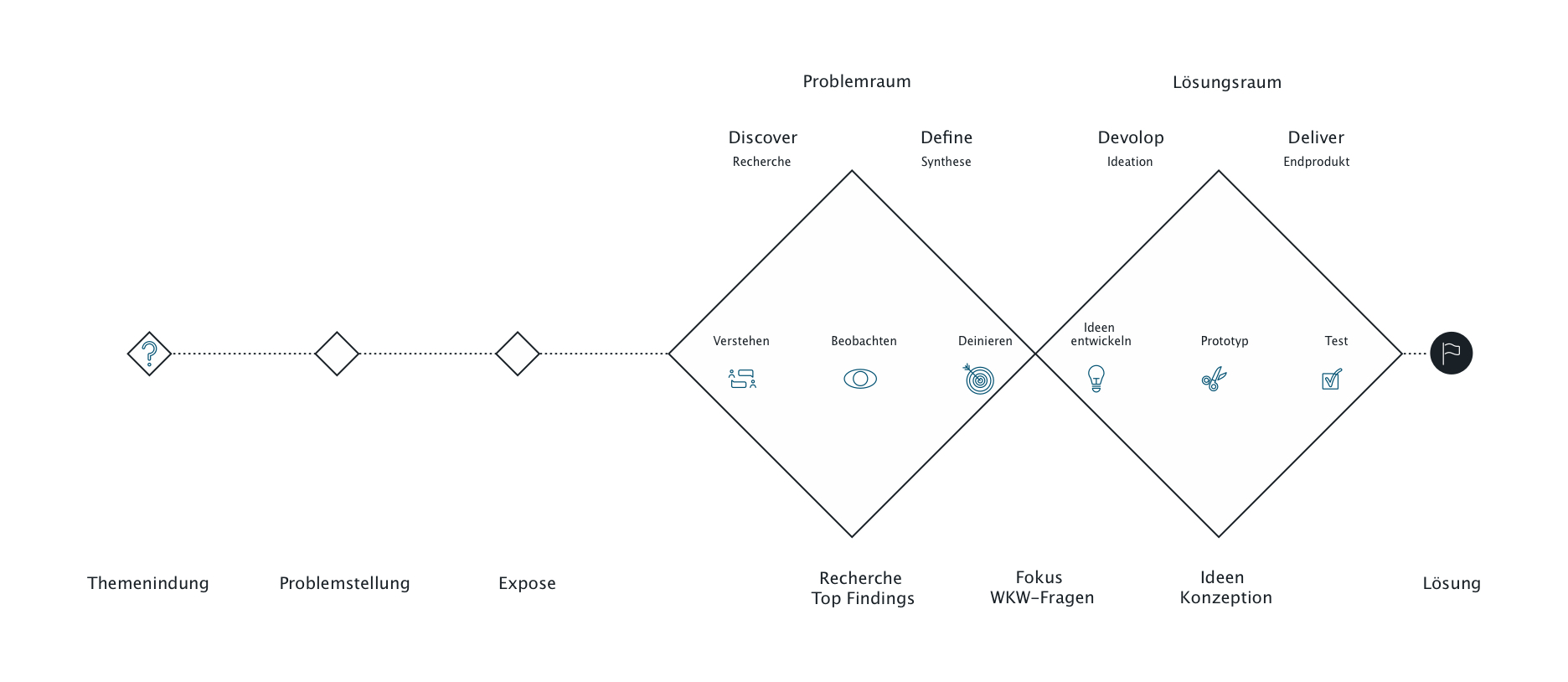
Recherche
Grundlage des Projektes HAVI ist die Primär- und Sekundärrecherche. Diese dienen dazu, erst einmal alle Themen rund um das autonome Fahren zu sammeln und danach in der Sekundärrecherche diese Informationen zu vertiefen.
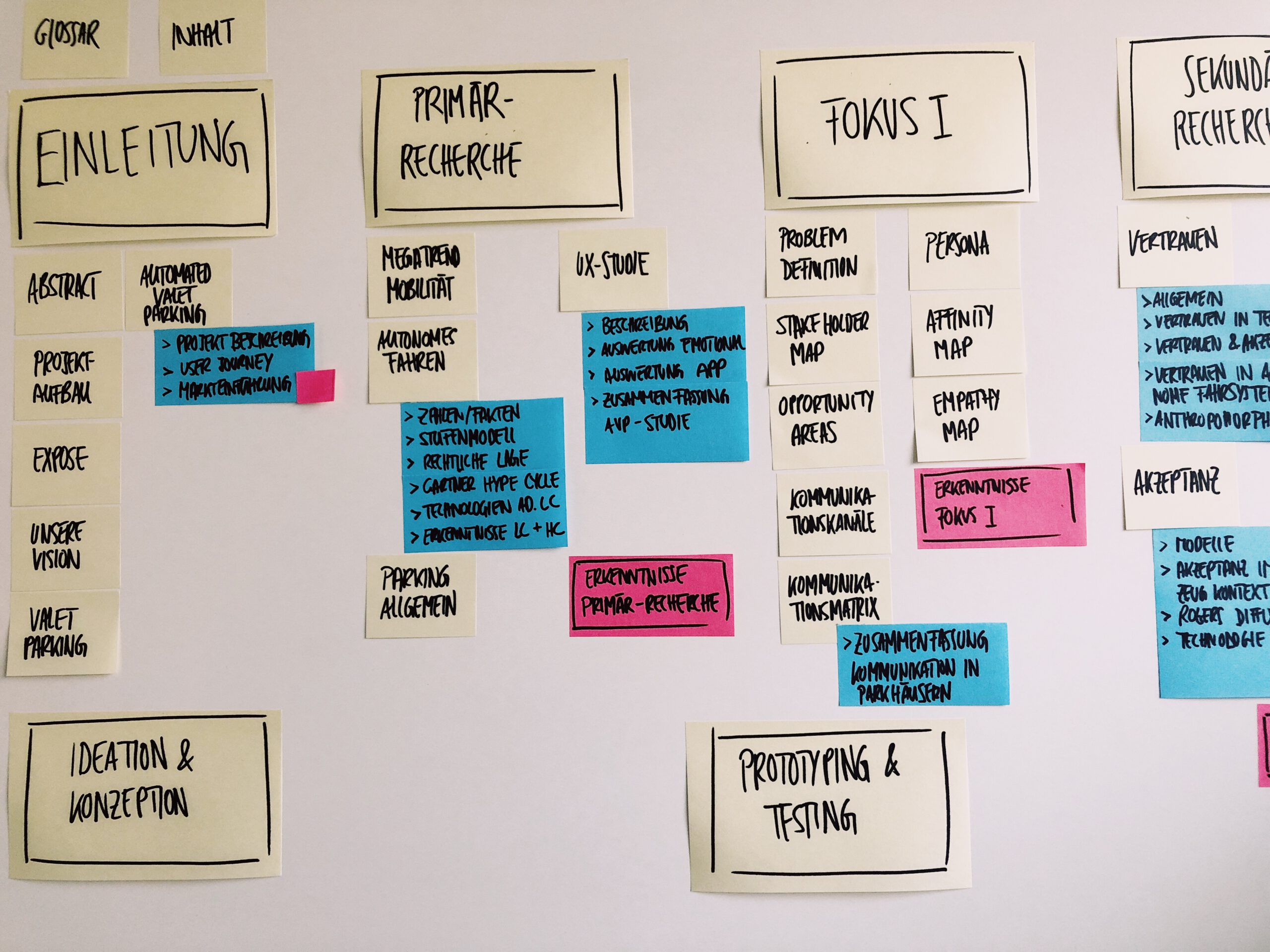
Primärrecherche
Zu Beginn haben wir eine umfassende Primärrecheche durchgeführt, um das Thema autonomes Fahren und alle Randthemen komplett zu durchleuchten.
Hierfür haben wir uns den Megatrend Mobilität angeschaut, analysiert, welche Formen es vom autonomen Fahrzeug gibt, was allgemein die Erkenntnisse aus einem Parkvorgang sind und letztendlich haben wir eine UX Studie zum aktuellen Stand des Automated Valet Parkings erstellt.
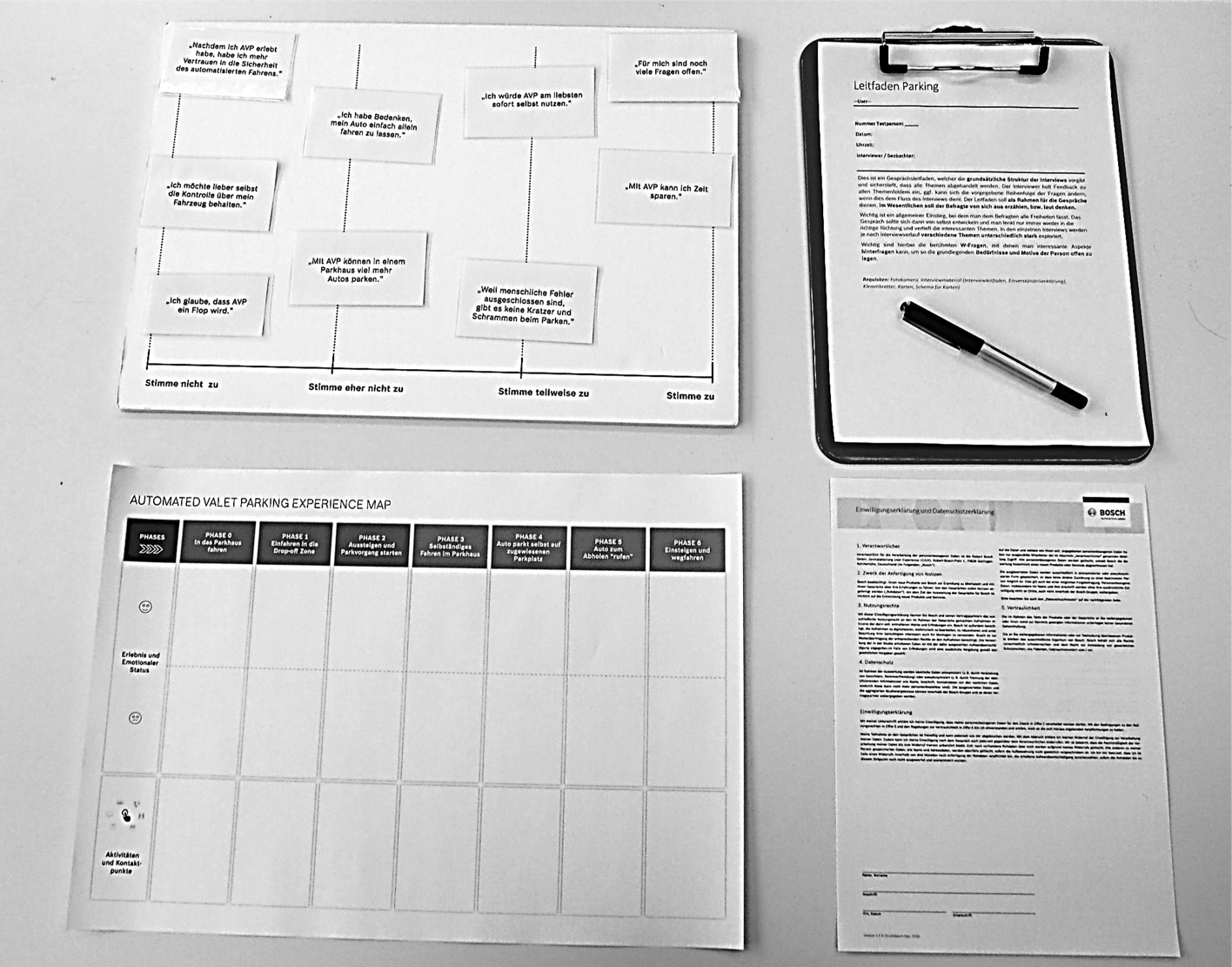
Fragebogen und User Journey

Interview im Mercedes-Benz Museum als Teil der UX Studie
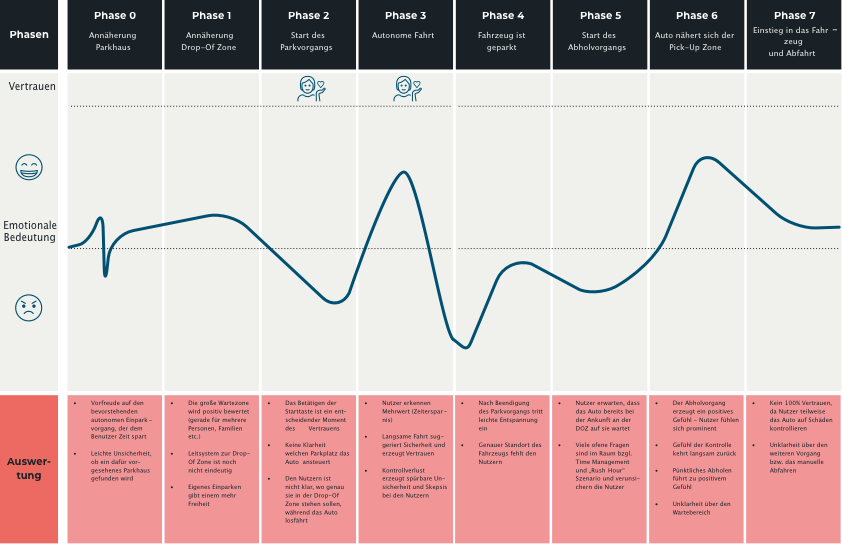
User Journey basierend auf der UX Studie zum Automated Valet Parking im Mercedes-Benz Museum
Sekundärrecherche
Während der Sekundärrecherche wird näher untersucht, wie die aktuelle Kommunikation im Straßenverkehr abläuft, welche Kommunikationskanäle hier verwendet werden und wie die Wahrnehmung im Straßenverkehr allgemein funktioniert. Dem vorangestellt erfolgt als theoretisches Grundgerüst eine Recherche des aktuellen Forschungsstandes zu den Themen Vertrauen und Akzeptanz, da diese Faktoren direkt mit der Kommunikation mit autonomen Fahrzeugen einhergehen.

Informelle Regeln im Straßenverkehr
- Dr. Natasha Merat, Professorin an der Universität Leeds
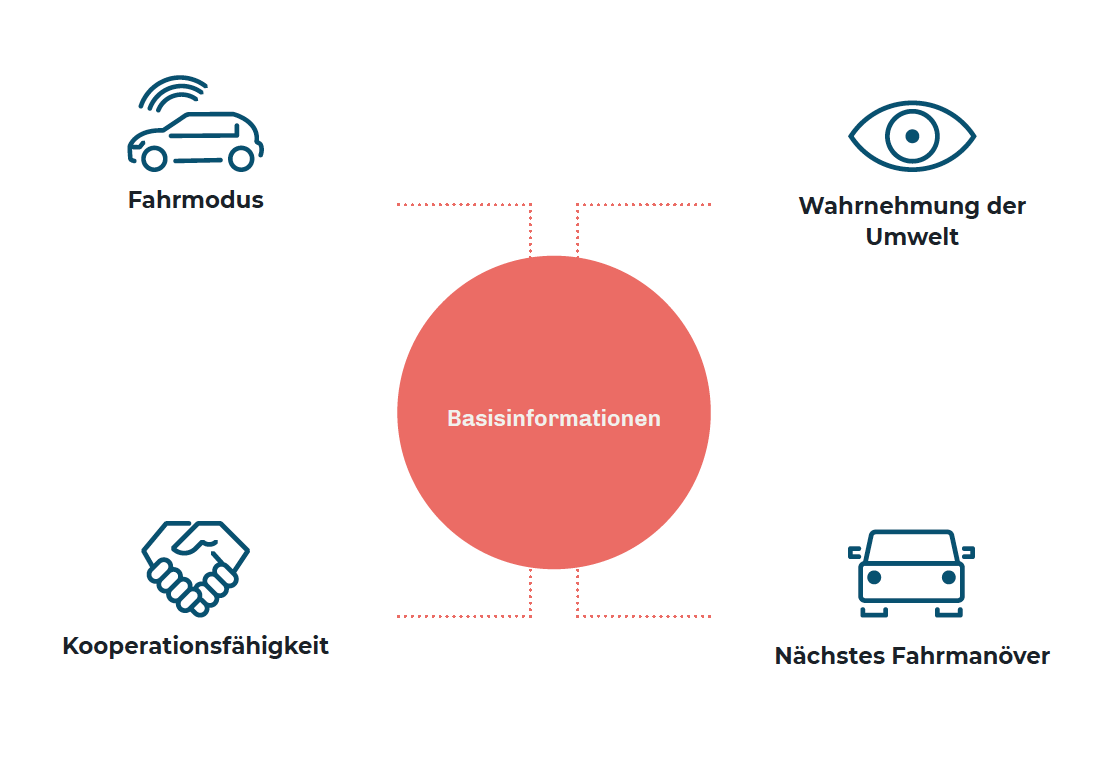
Basisinformationen
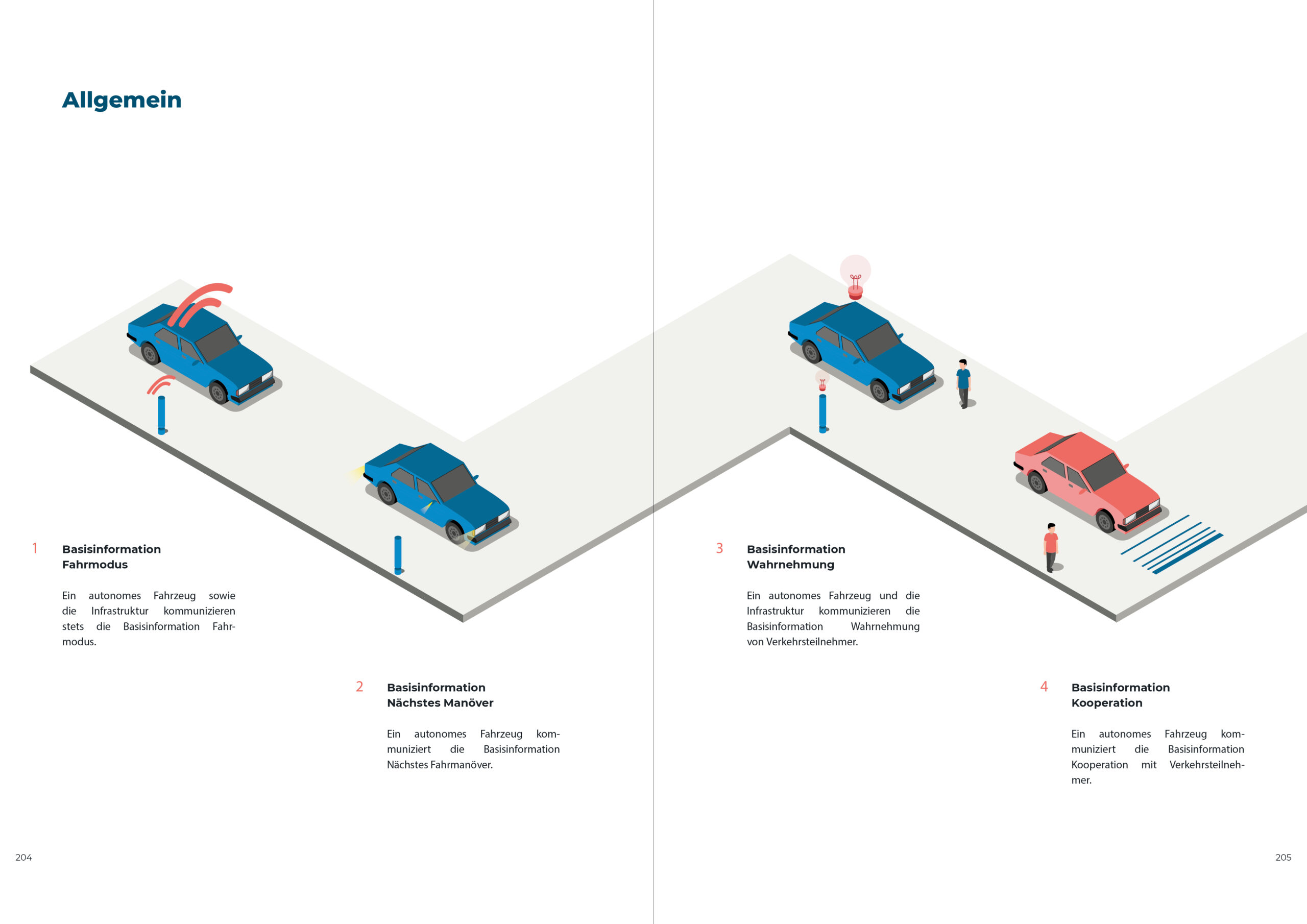
Die Basisinformationen sollte das autonome Fahrzeug anderen Verkehrsteilnehmern mitteilen:
Kategorie A: Fahrmodus
Kategorie B: Nächste Aktion des AFs
Kategorie C: Wahrnehmung der Umwelt
Kategorie D: Kooperationsfähigkeit
Design Optionen
Durch diese Design Optionen können laut InterACT die Basisinformationen übermittelt werden.
- Deb Miller Landau
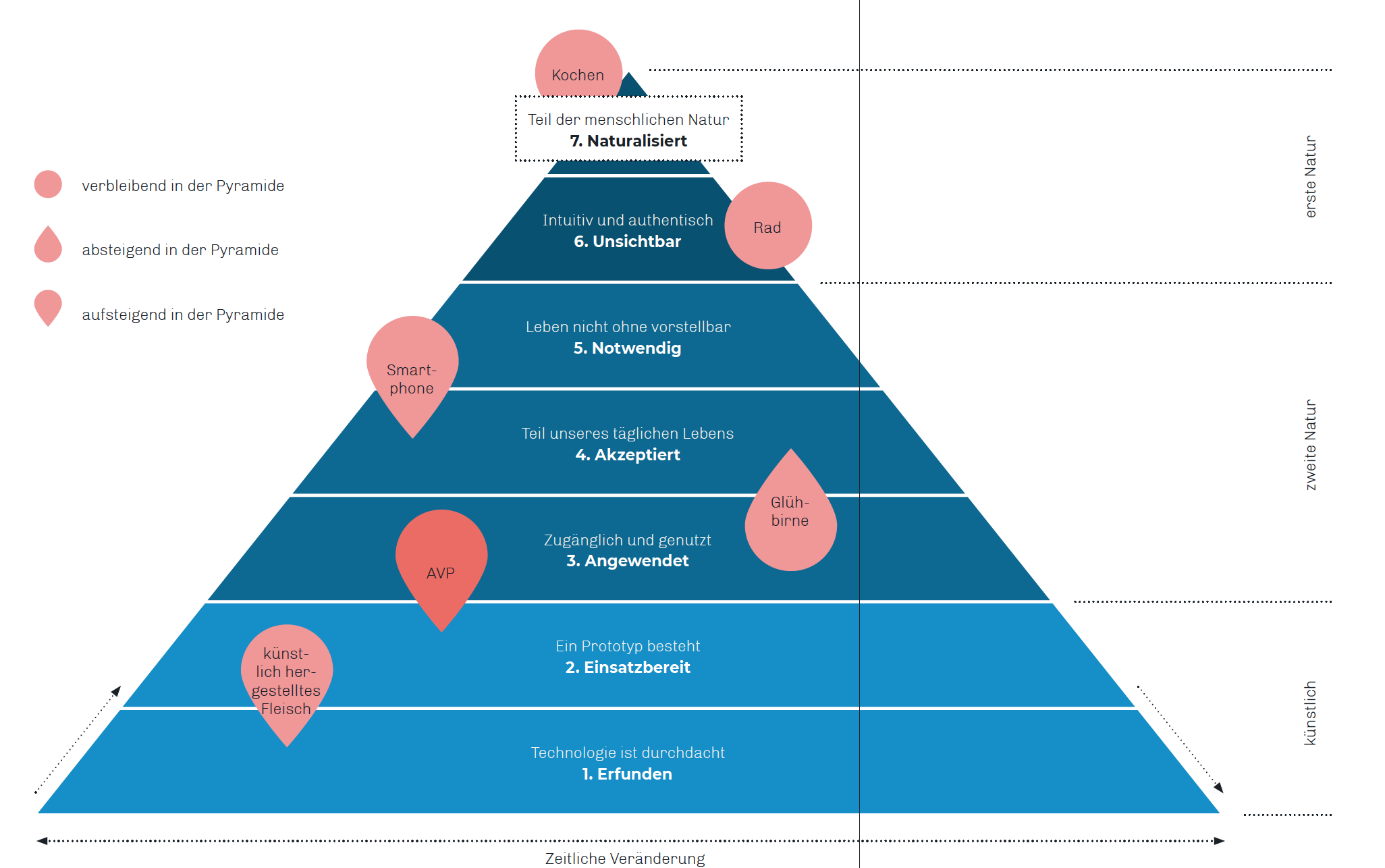
Die Technologie-Pyramide von Koert van Mensvoort wird genutzt, um Technologien rund um das Auto einzuordnen und zu bewerten, welchen Stellenwert die Technologie in der Gesellschaft einnimmt.
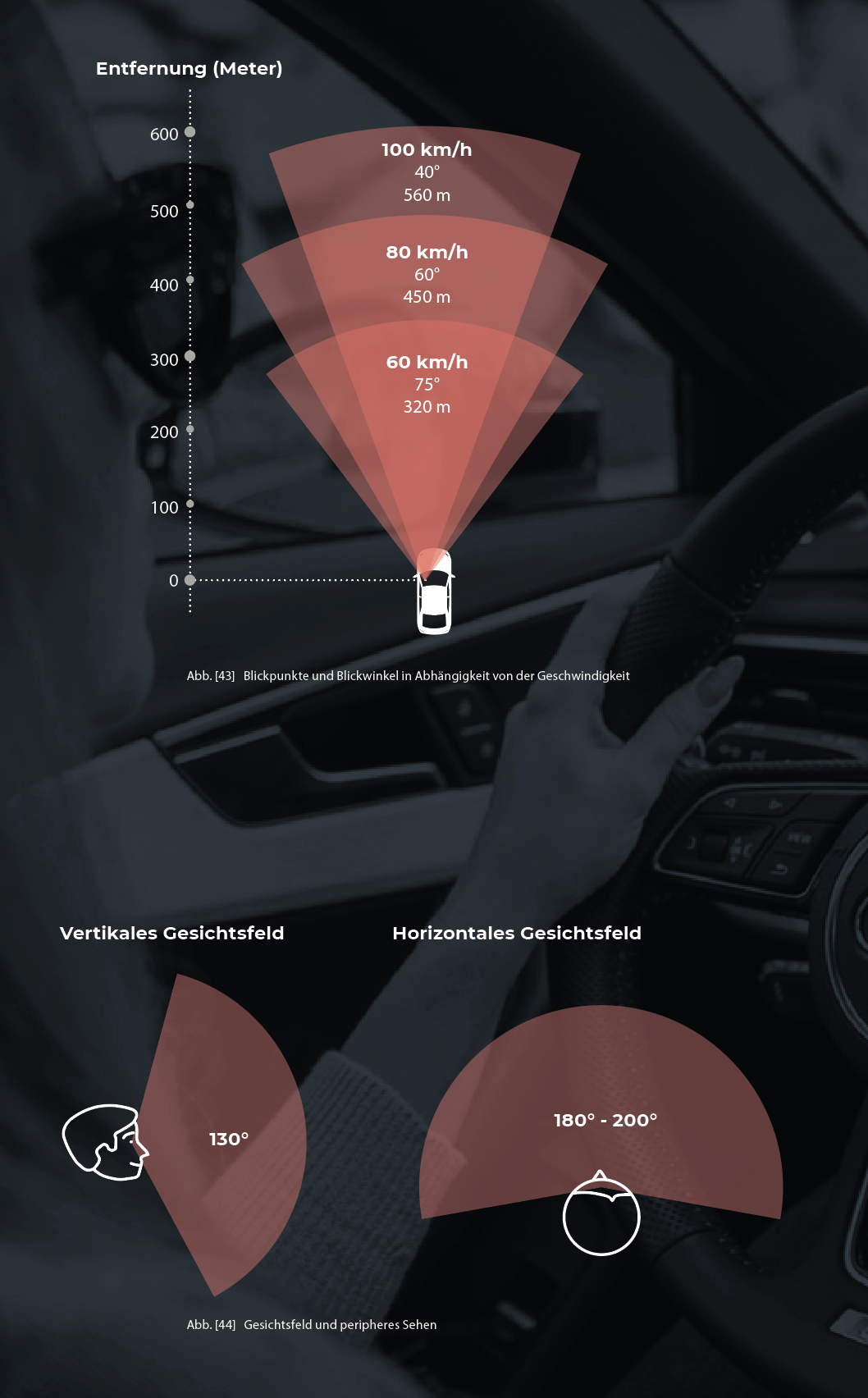
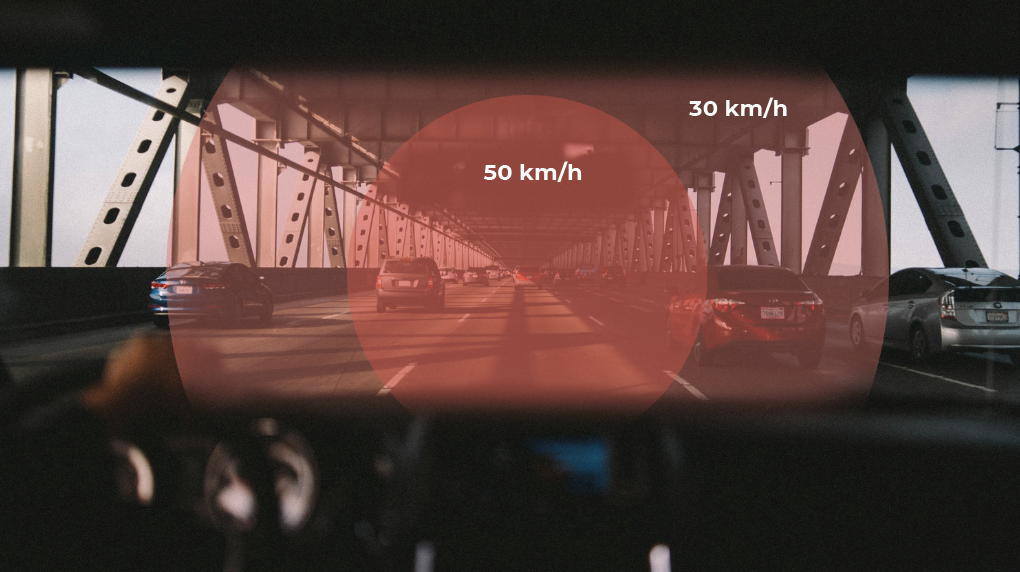
Wahrnehmung der Autofahrer im Straßenverkehr
Key Insights aus der Recherche
1
Bei der Entwicklung und Umsetzung des autonomen Fahrens, muss die Gestaltung der Infrastruktur zwangsläufig berücksichtigt werden.
2
Ein autonomes Fahrzeug muss in der Lage sein, mit außenstehenden Verkehrsteilnehmern zu kommunizieren.
3
Aufgrund der aktuellen Markteinführungsphase gibt es bisher noch keine festgelegten Normen bzw. Konventionen hinsichtlich der Kommunikation.
4
Informelle Regeln sind im Straßenverkehr, besonders im Niedriggeschwindigkeitsbereich, der Hauptkommunikationskanal.
Synthese
Auf Grundlage der bisherigen Recherche liegt der Fokus dieser Thesis auf der Wahrnehmung von autonomen Fahrzeugen durch Passanten und Autofahrer und die damit verbundene Kommunikation. Dabei ist zu erwähnen, dass sich diese Arbeit ausschließlich mit Situationen befasst, in welchen autonome Fahrzeuge ohne Insassen eingesetzt werden.
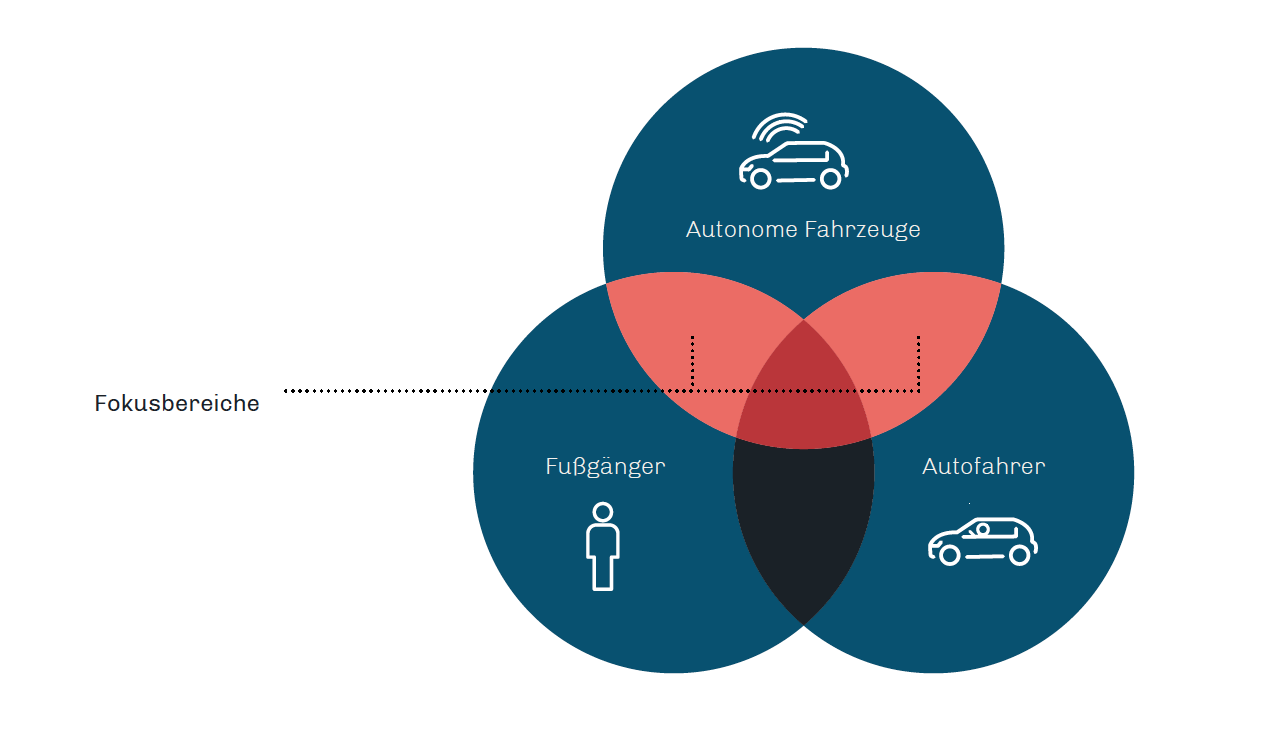
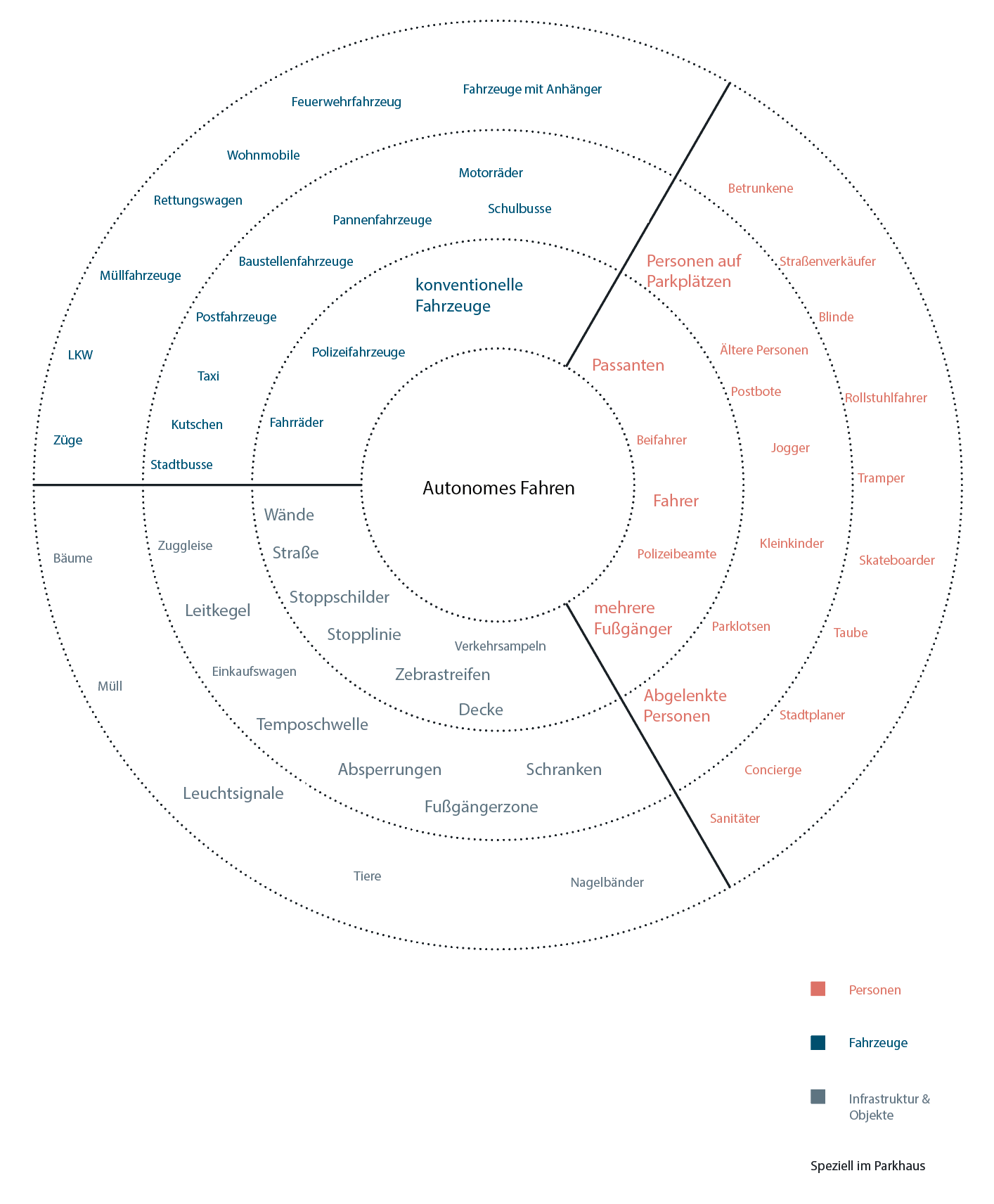
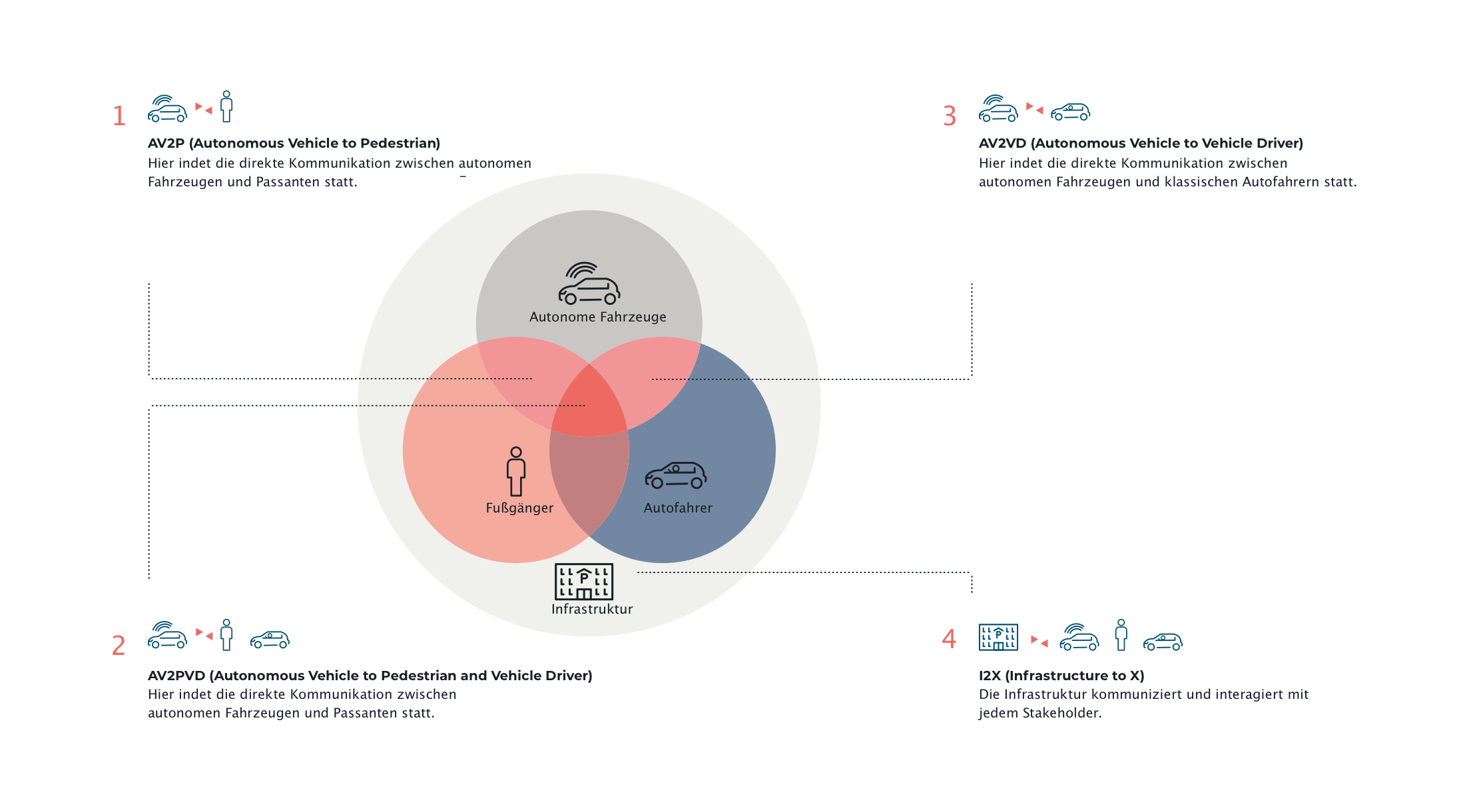
Stakeholder Map
Die Stakeholder Map dient dazu, herauszuarbeiten, welche Personen mit einem autonomen Fahrzeug in Kontakt treten können und welche die wichtigsten Stakeholder für das Projekt sind:
- konventionelle Fahrzeuge + Fahrer
- Infrastruktur im Parkhaus
- Passanten
Touchpoints
Im Parkhaus ergeben sich unterschiedliche Touchpoints an denen die Stakeholder miteinander kommunizieren.
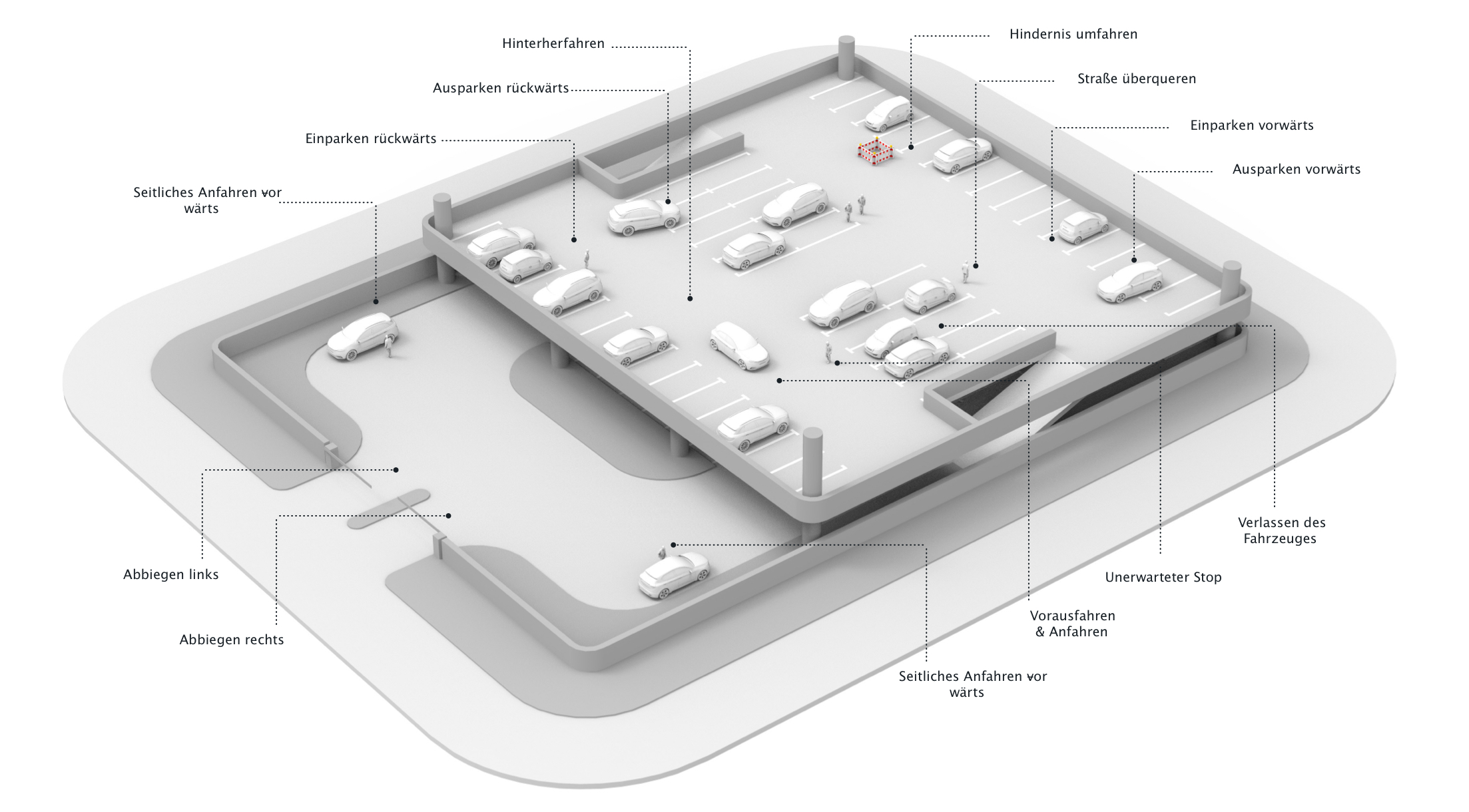
Opportunity Areas
Die Untersuchungen der unterschiedlichen Touchpoints in Parkhäusern haben ergeben, welche Kommunikationsformen relativ häufig stattfinden.
Shadowing
Durch Beobachtungen im fließenden Straßenverkehr sowie in verschiedenen Parkhäusern ergaben sich drei Touchpoints der Stakeholder, welche für das weitere Projekt am wichtigsten erachtet werden und daher weiter verfolgt werden. Diese Touchpoints kommen besonders häufig vor und erfordern aktuell immer eine Kommunikation zwischen den menschlichen Verkehrsteilnehmern. Das Shadowing dient dazu, Use Cases zu definieren und mit diesen Use Cases im späteren Verlauf die Ideation Phase zu beginnen.
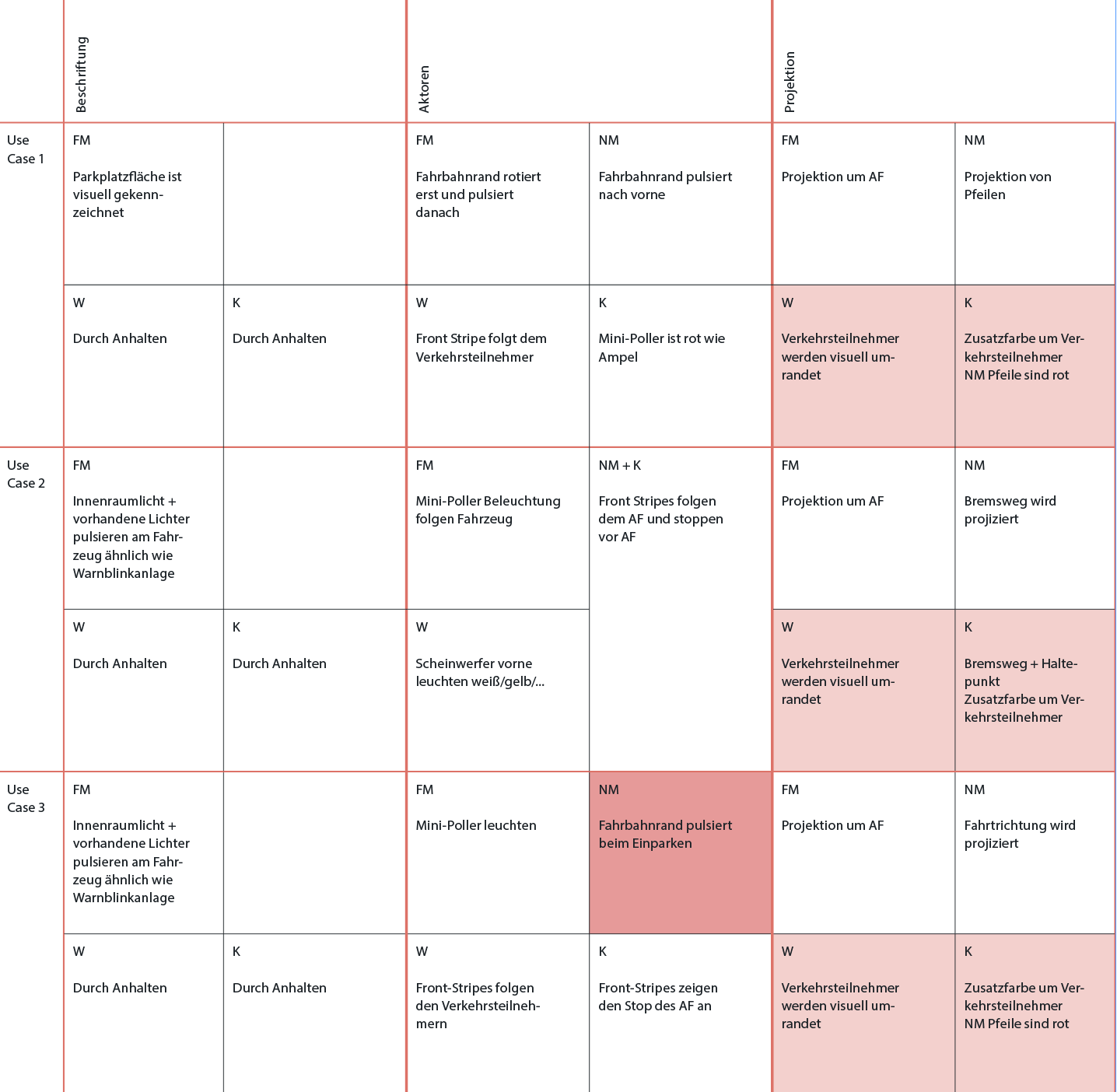
Use Cases
Für den weiteren Verlauf des Projektes, helfen Use Cases, welche eine Abfolge verschiedener Tasks definieren und als Grundlage für die anschließende Ideation dienen.
Use Case I: Fahrzeug startet
Welche Informationen sendet das AF zu welchem Zeitpunkt an den Passanten bzw. an den Autofahrer?
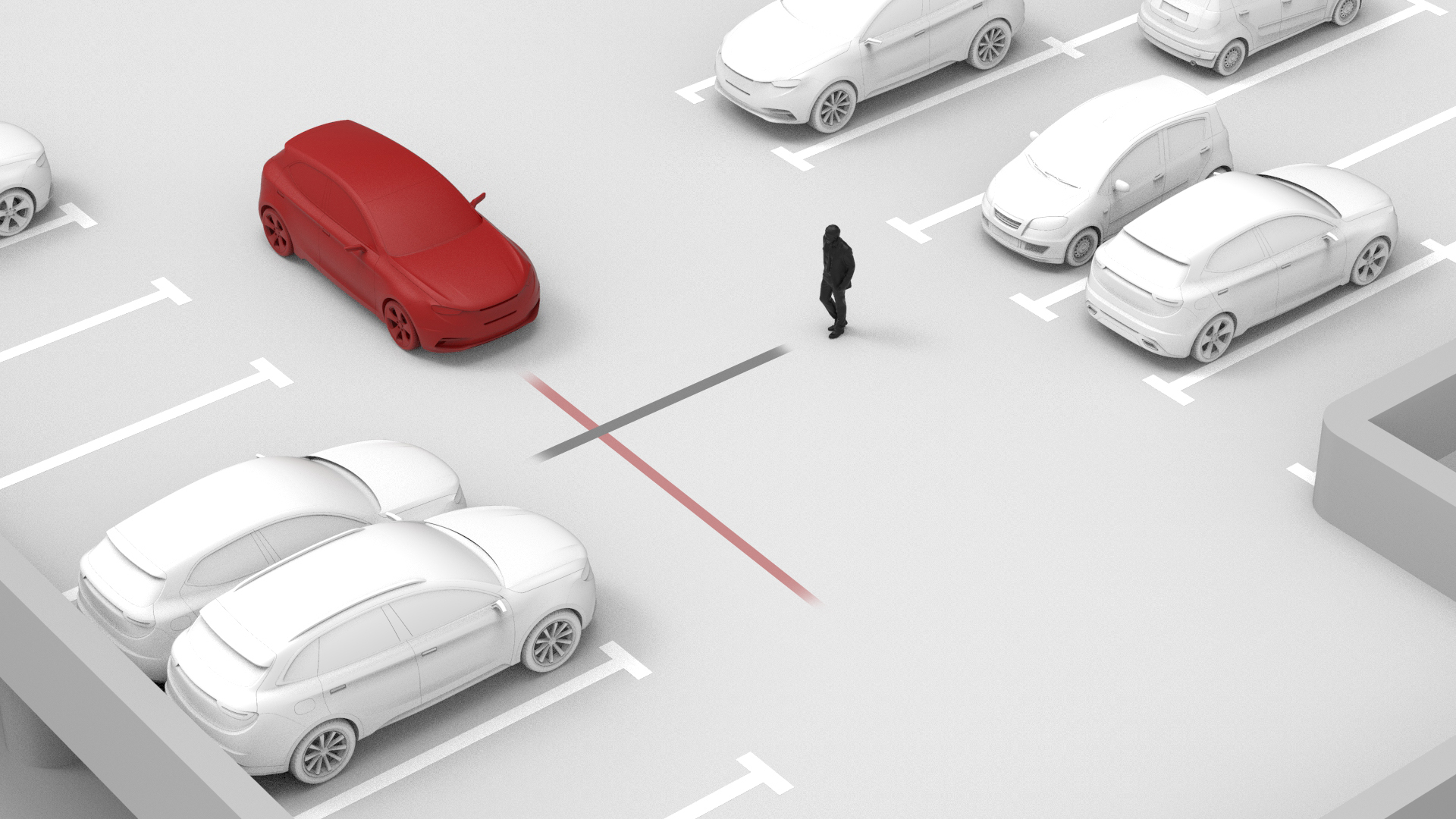
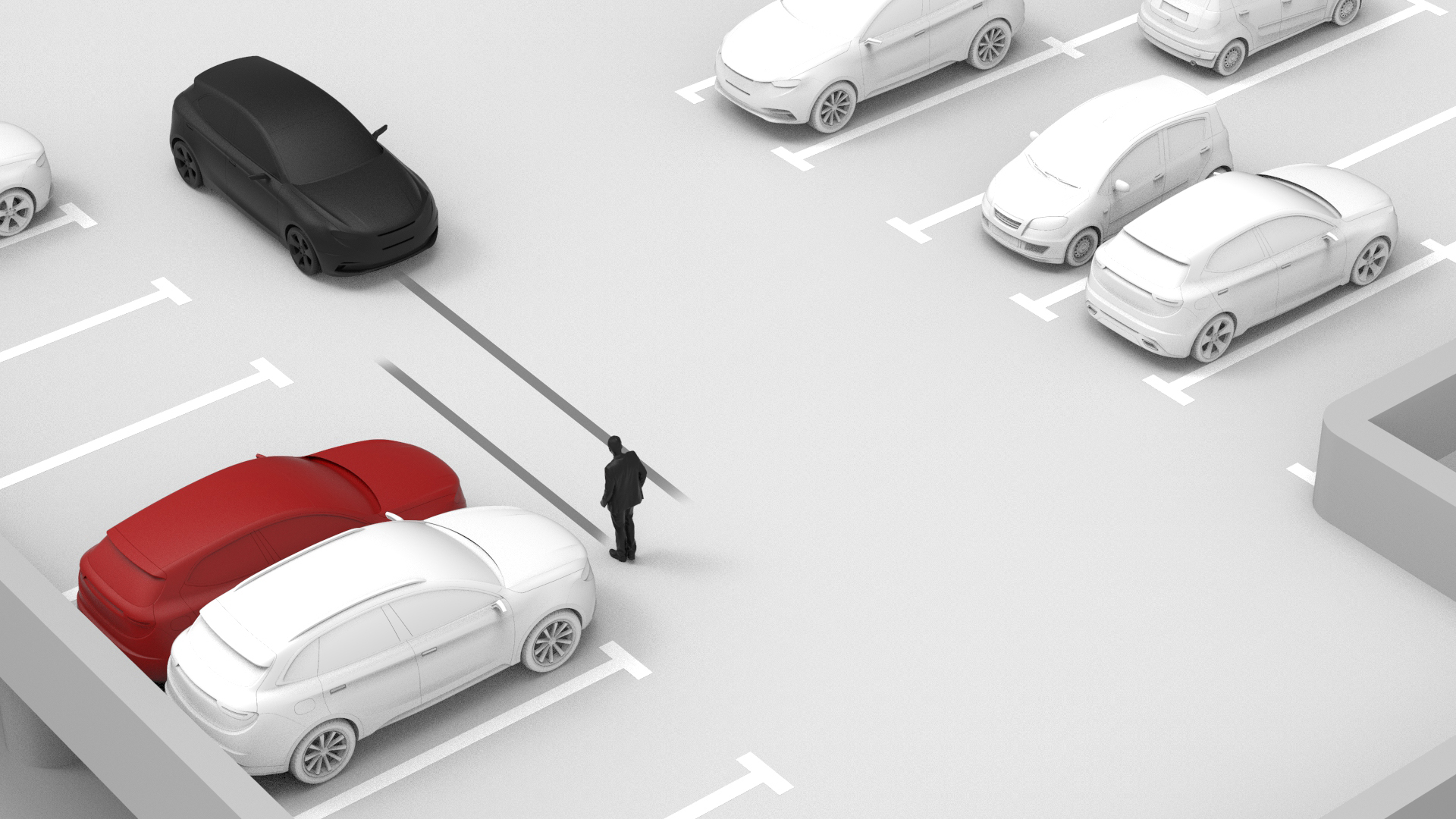
Use Case II: Straße überqueren
Welche Informationen benötigt der Passant zu welchem Zeitpunkt?
Use Case III: Autonomes Fahrzeug fährt voraus/kommt entgegen
Welche Informationen sendet das AF an
das vordere Fahrzeug bzw. welche an das hintere Fahrzeug?
Key Insights aus der Synthese
1
Informelle Regeln
Wie können informelle Regeln durch autonome Fahrzeuge kommuniziert werden?
2
Anthropomorph vs Technik
Wann müssen Fahrzeuge anthropomorph wirken?
Wann müssen Fahrzeuge technisch wirken?
3
Information
Wann und wie müssen Basisinformationen zur Verfügung gestellt werden?
Gibt es noch weitere Informationen, die bereitgestellt werden müssen?
Ideation
Mit How-might-we-Fragen fassen wir die Use Cases, Forschungsfragen sowie Problemfelder zusammen. Mit den gesammelten Fragen werden Workshops mit unterschiedlichen Mitarbeitern des Kooperationspartners Bosch und der Hochschule geführt. Die Fragen sind daher Grundlage für die Ideation Phase. Als Grundlage der HMW-Fragen dienen aus der Recherche gewonnenen Design Optionen und Basisinformationen. Es soll also herausgefunden werden, wie wir die Basisinformationen mit Hilfe der Design Optionen kommunizieren können.
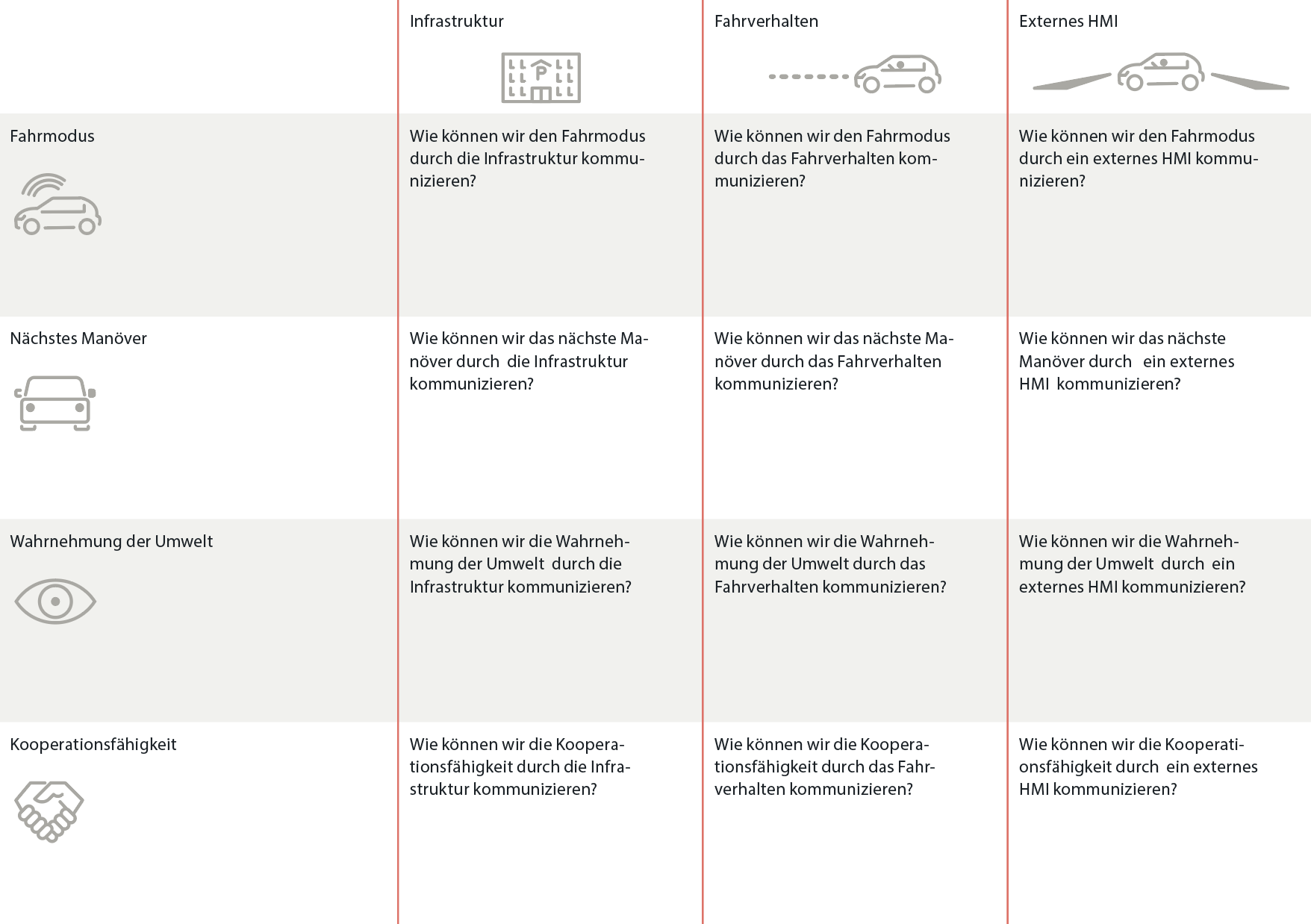
HMW-Fragen zu den Basisinformationen und Design Optionen
Affinity Map
Ideen für alle Design Optionen und deren Basisinformationen werden mit Hilfe einer Affinity Map geclustert und bewertet
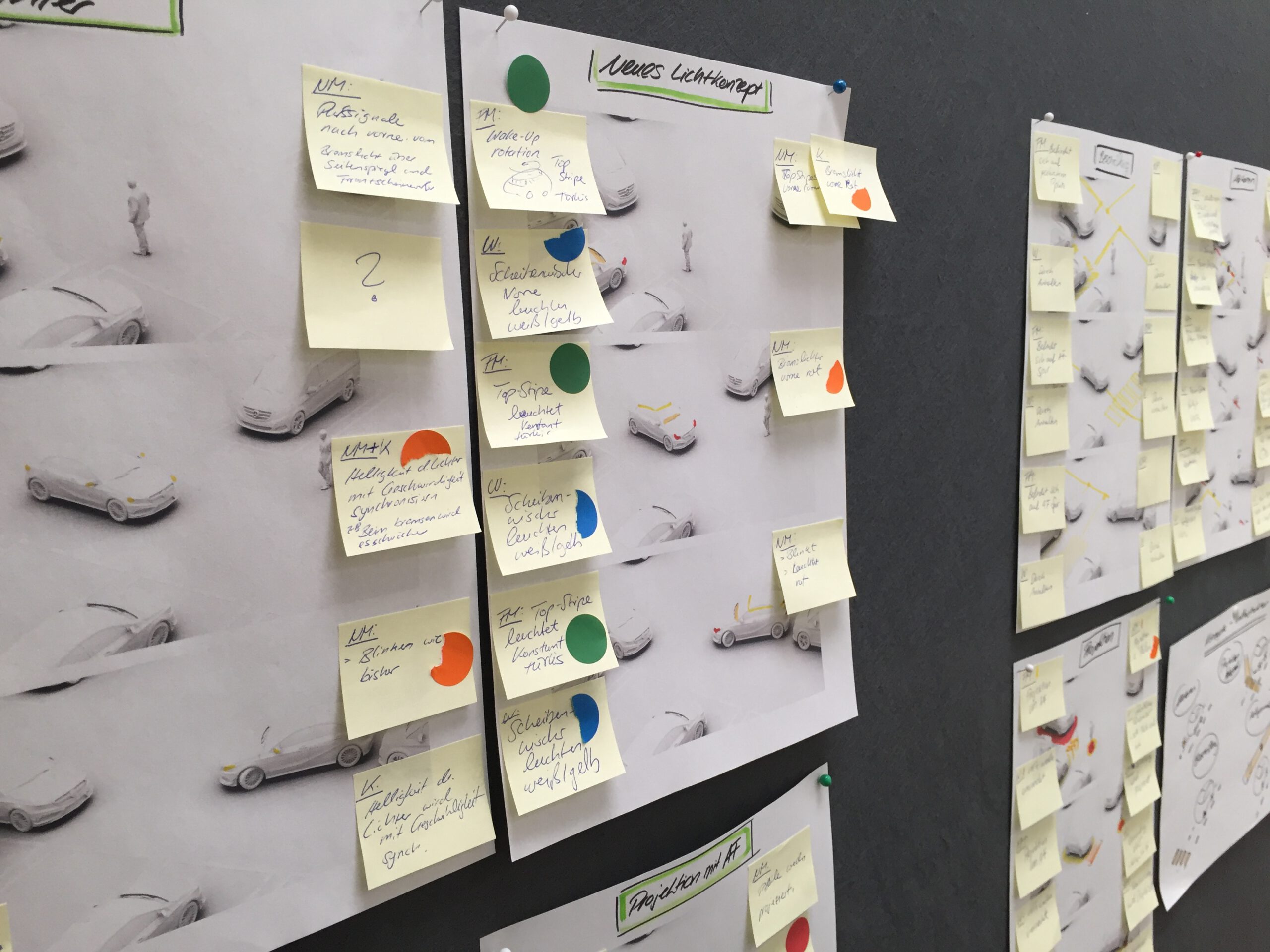
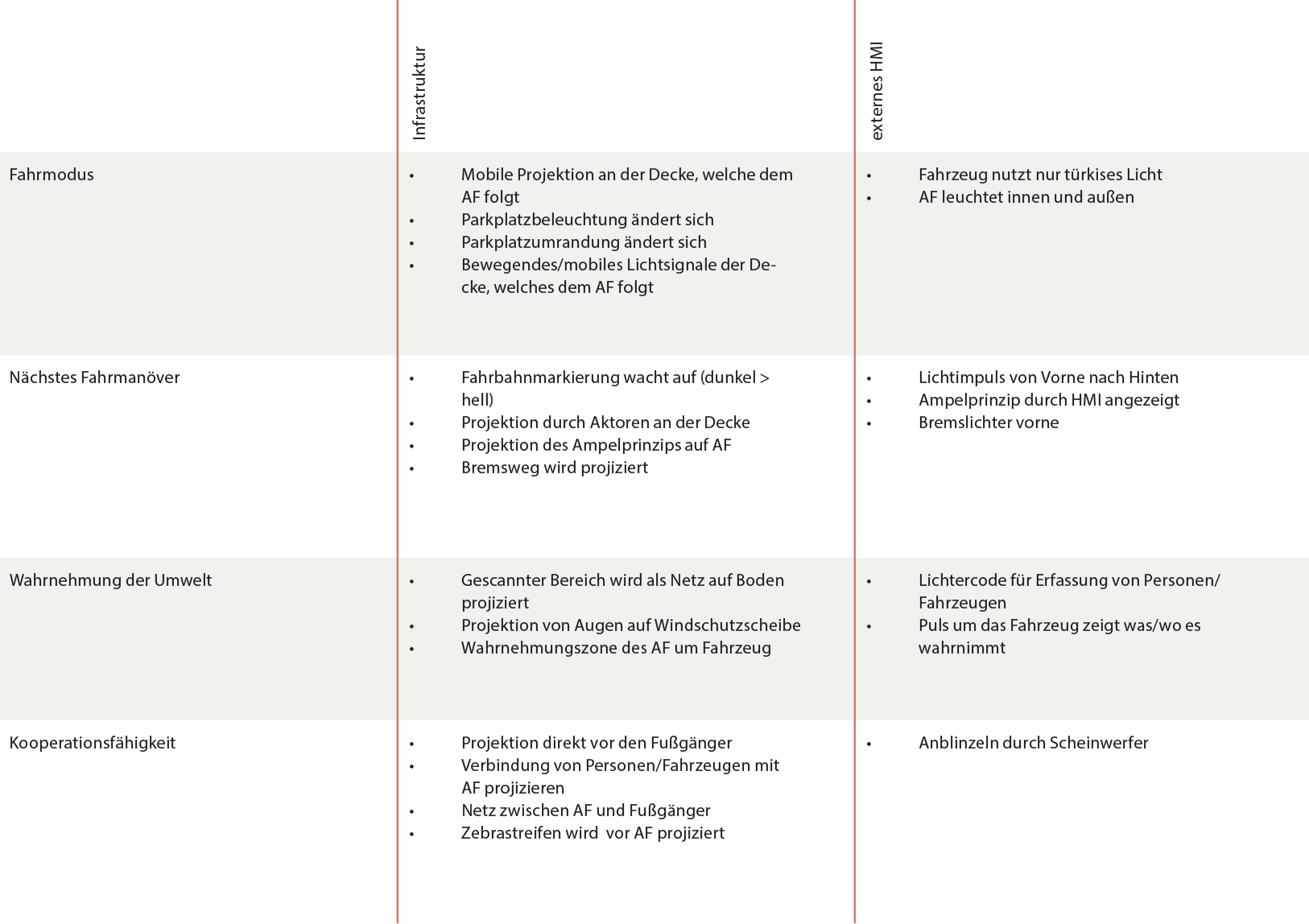
Ideenmatrix
Durch die Ideenfindung sind unterschiedliche Begriffe definiert worden, welche im Projekt weiter so genutzt werden.
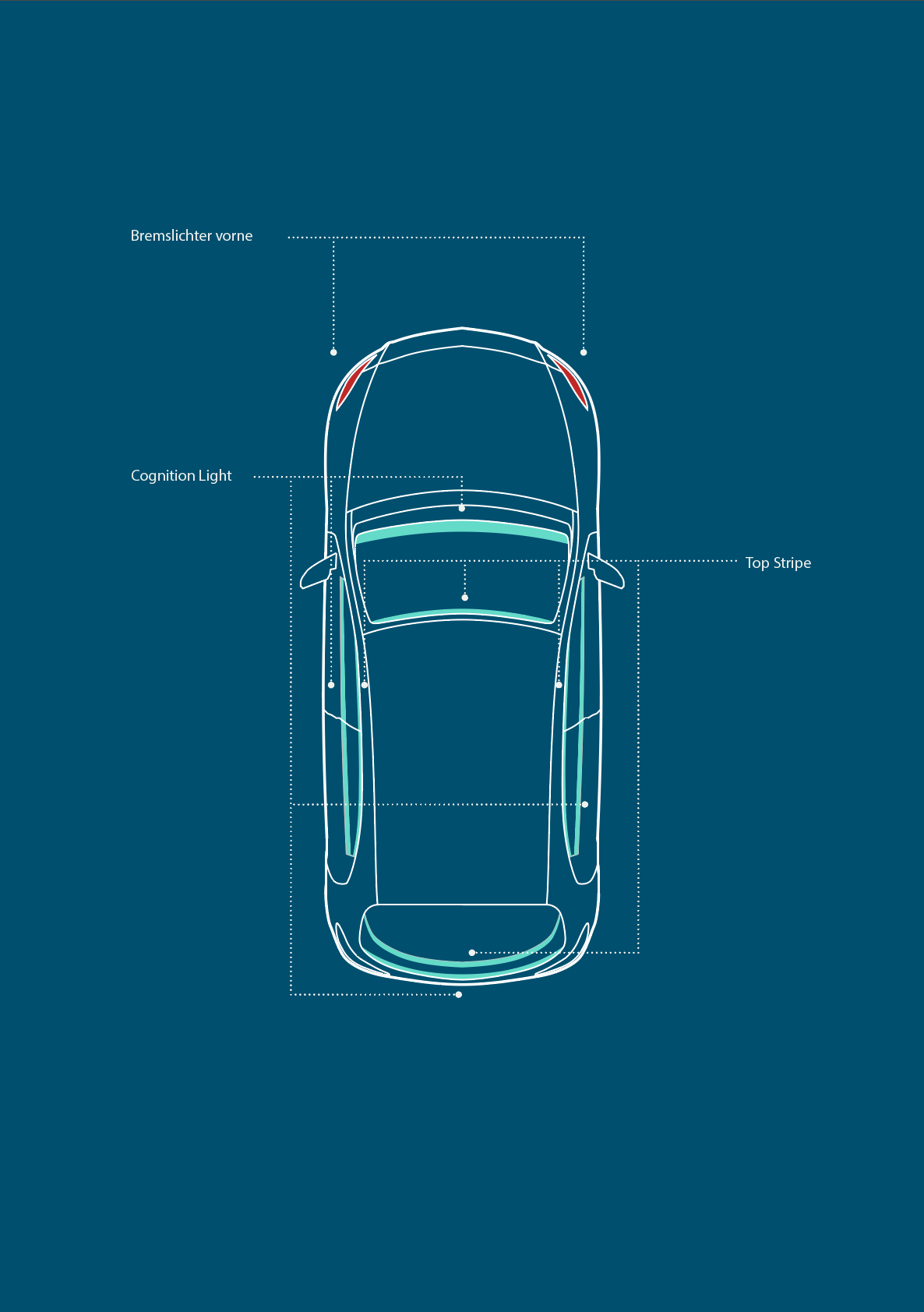
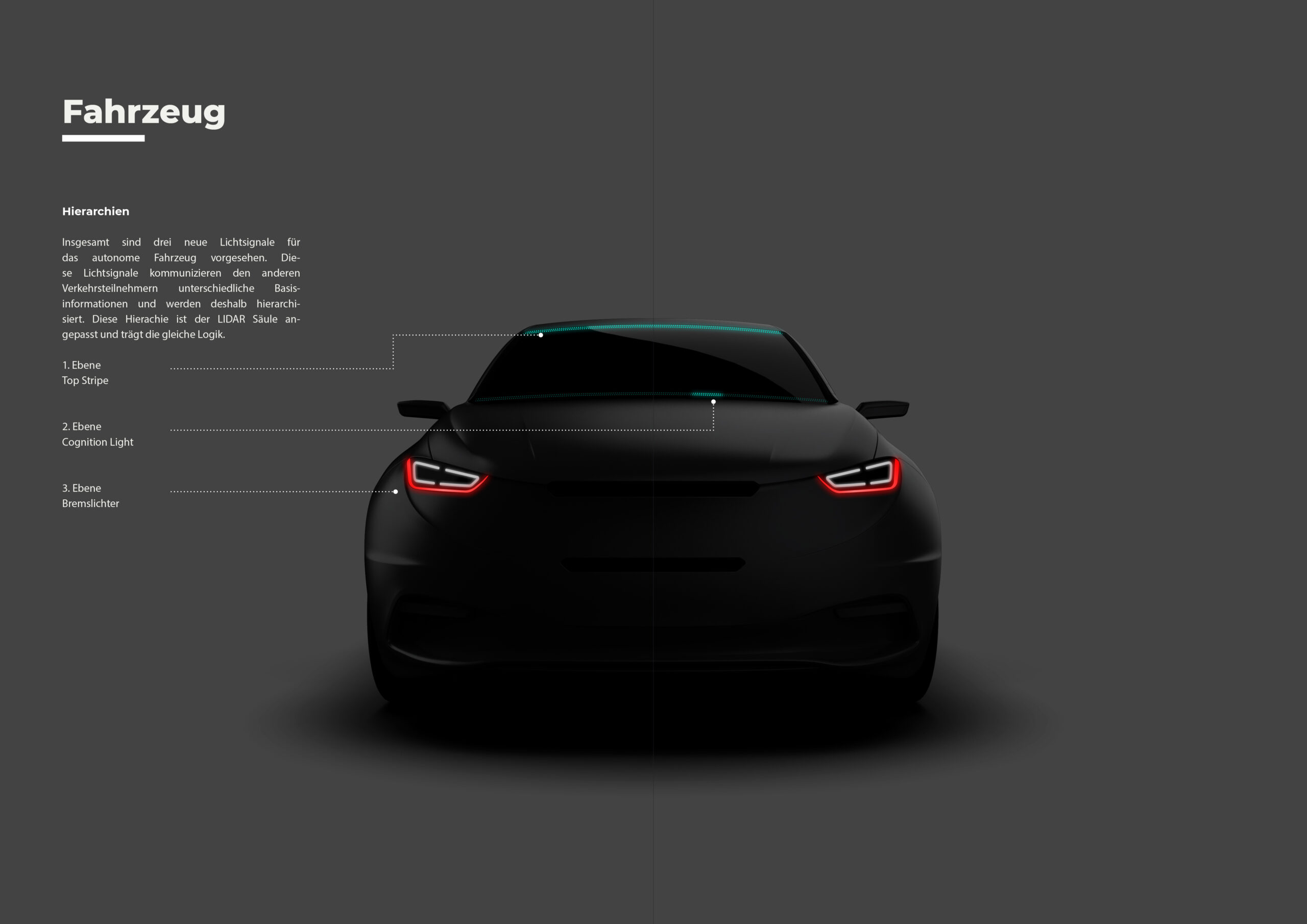
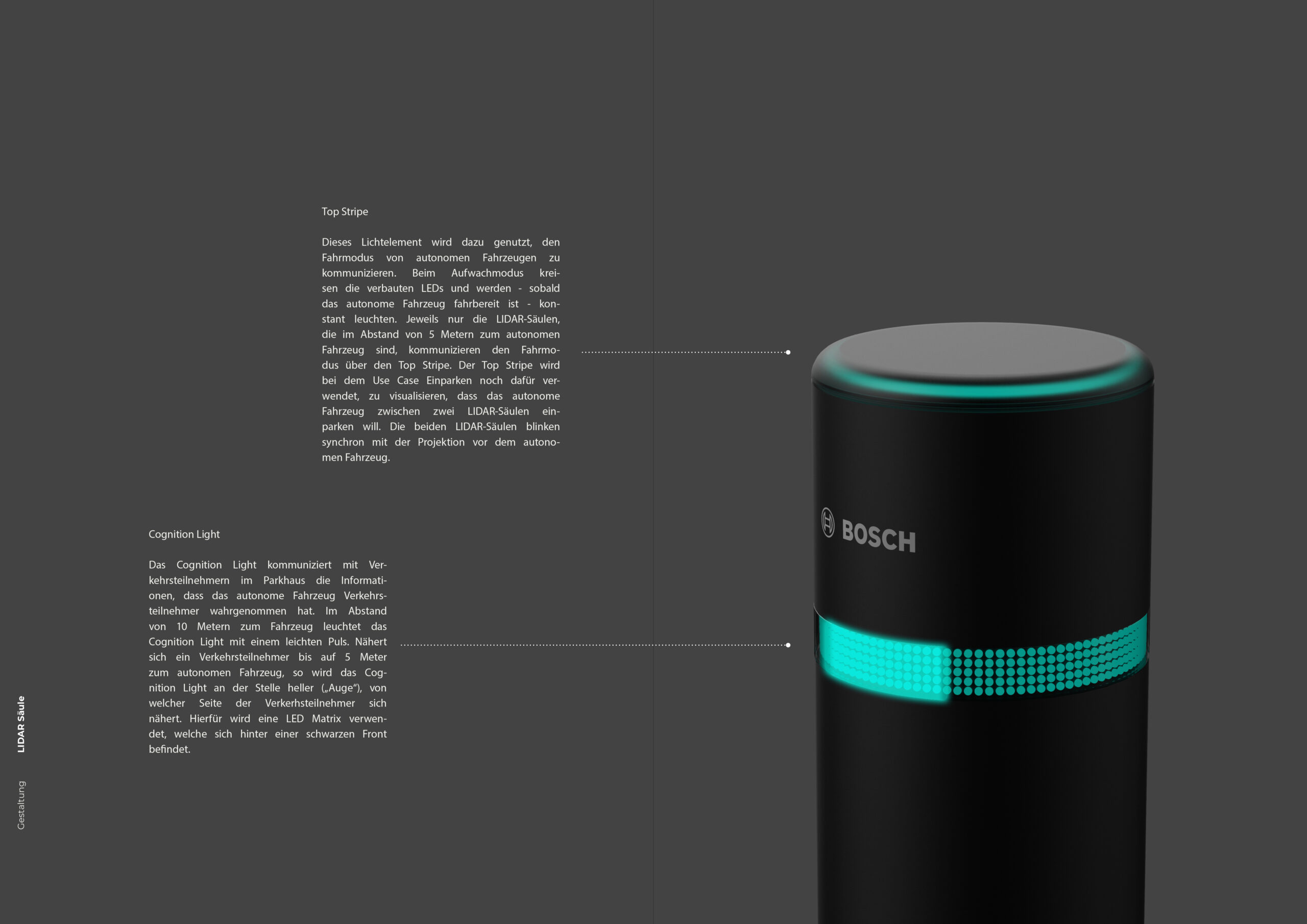
Top Stripe
Lichtelement, welches am oberen Teil (Dach, Türen, Fensterscheiben) des Fahrzeuges angeordnet ist.
Cognition Light
Lichtelement, welches am unteren Teil (Türen, Fensterscheiben) des Fahrzeuges angeordnet ist.
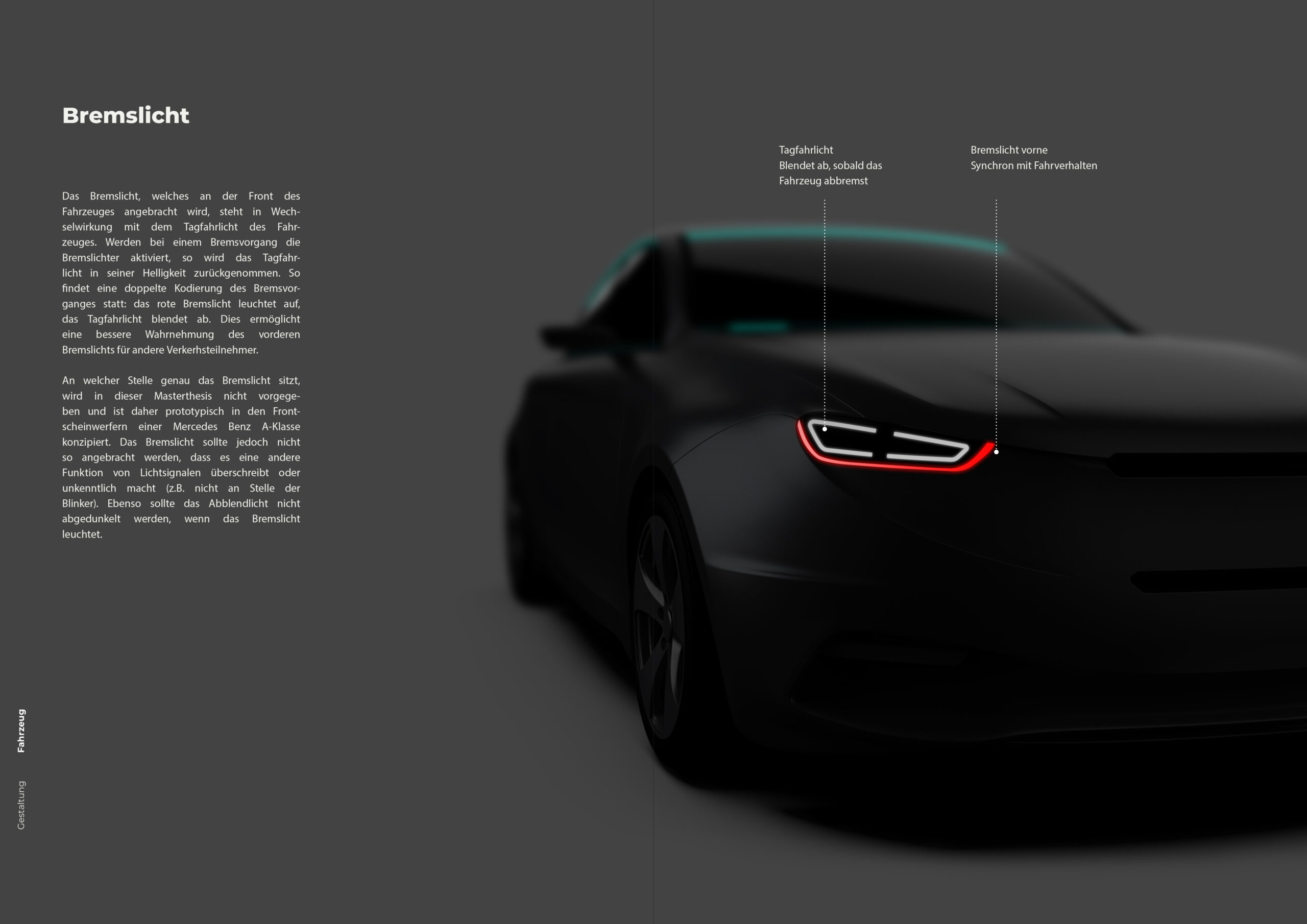
Bremslichter vorne
Lichtelement am vorderen Bereich des Fahrzeuges
Weitere Ideen und Konzepte bauen wesentlich auf diese Lichtelemente auf.

Konzept
Für die Umsetzung und Realisierung seitens des Projektpartners, wurden die Konzepte in drei Phasen eingeteilt. Diese unterscheiden sich in der eingesetzten Technologie zur Kommunikation von autonomen Fahrzeugen zu anderen Verkehrsteilnehmern.
Testing
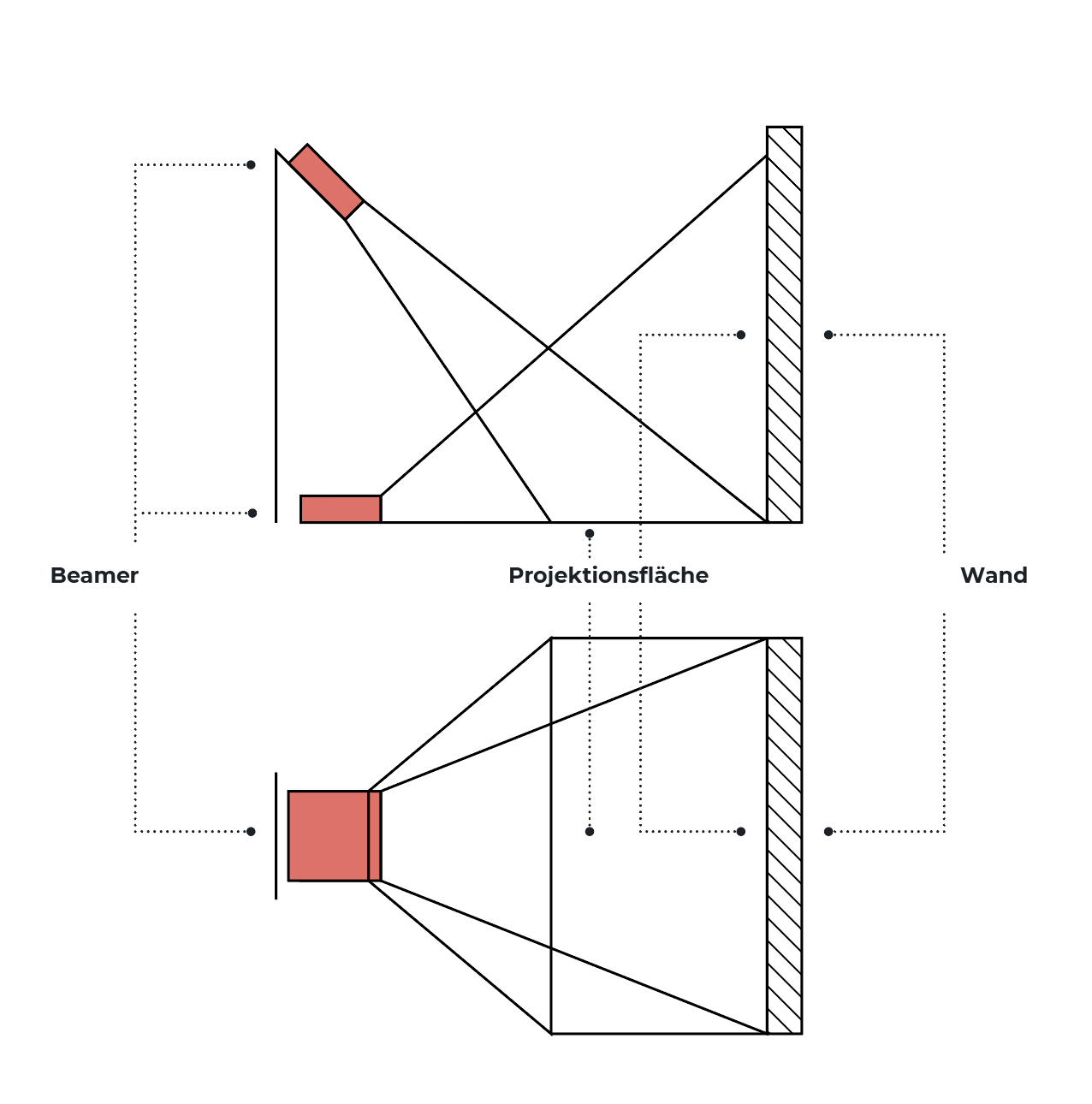
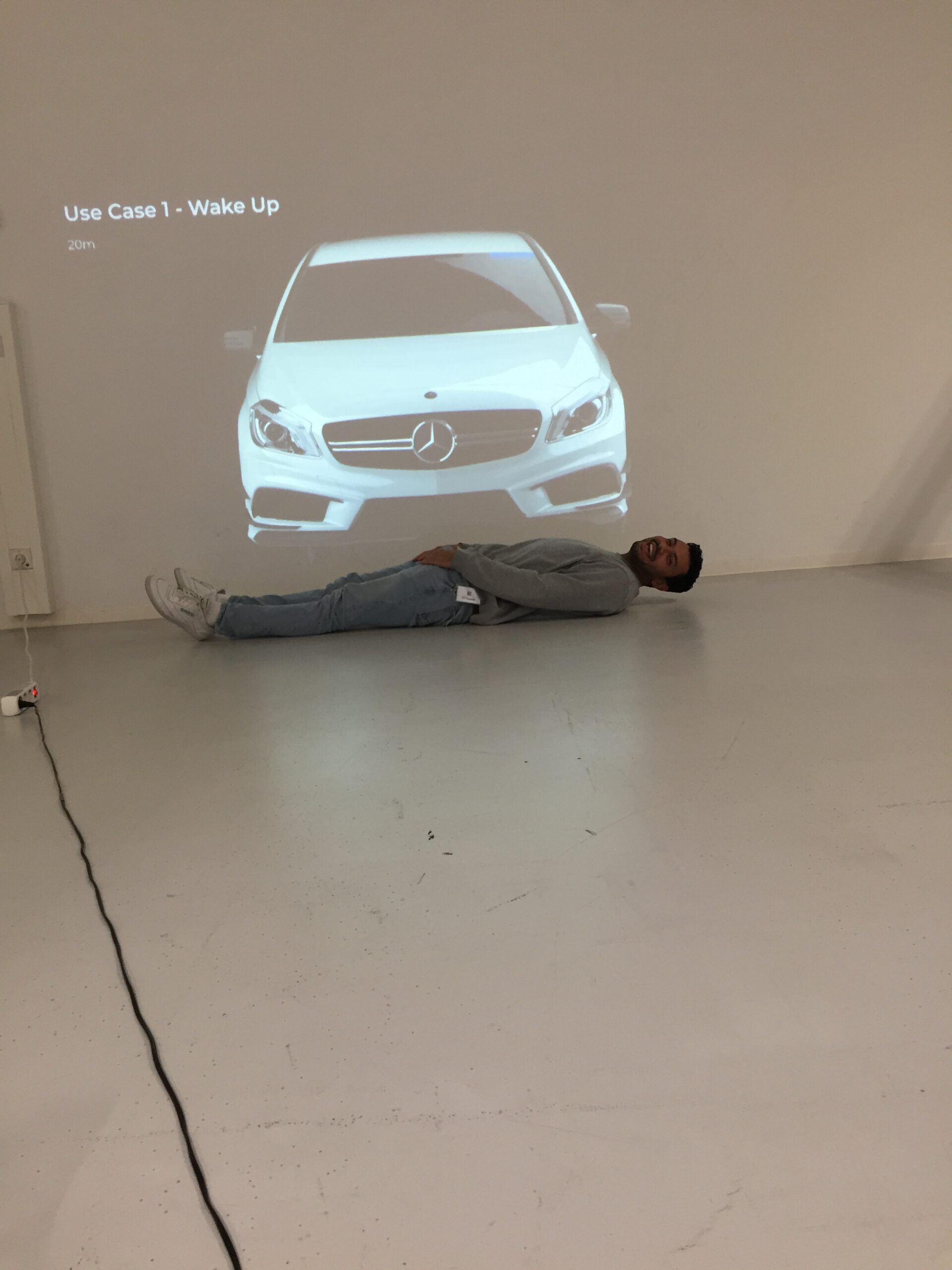
Für die Überprüfung der Konzepte wurde anhand von zwei Use Cases ein Testverfahren entwickelt. Die dadurch gewonnen Erkenntnisse dienen der Ausarbeitung der Gestaltung. Hierfür wurde versucht, eine maßstabsgetreue Simulation der Use Cases umzusetzen, welche gemeinsam mit den Probanden durchgespielt wurden.

Testaufbau mit Beamer

Key Insights aus dem Testing
1
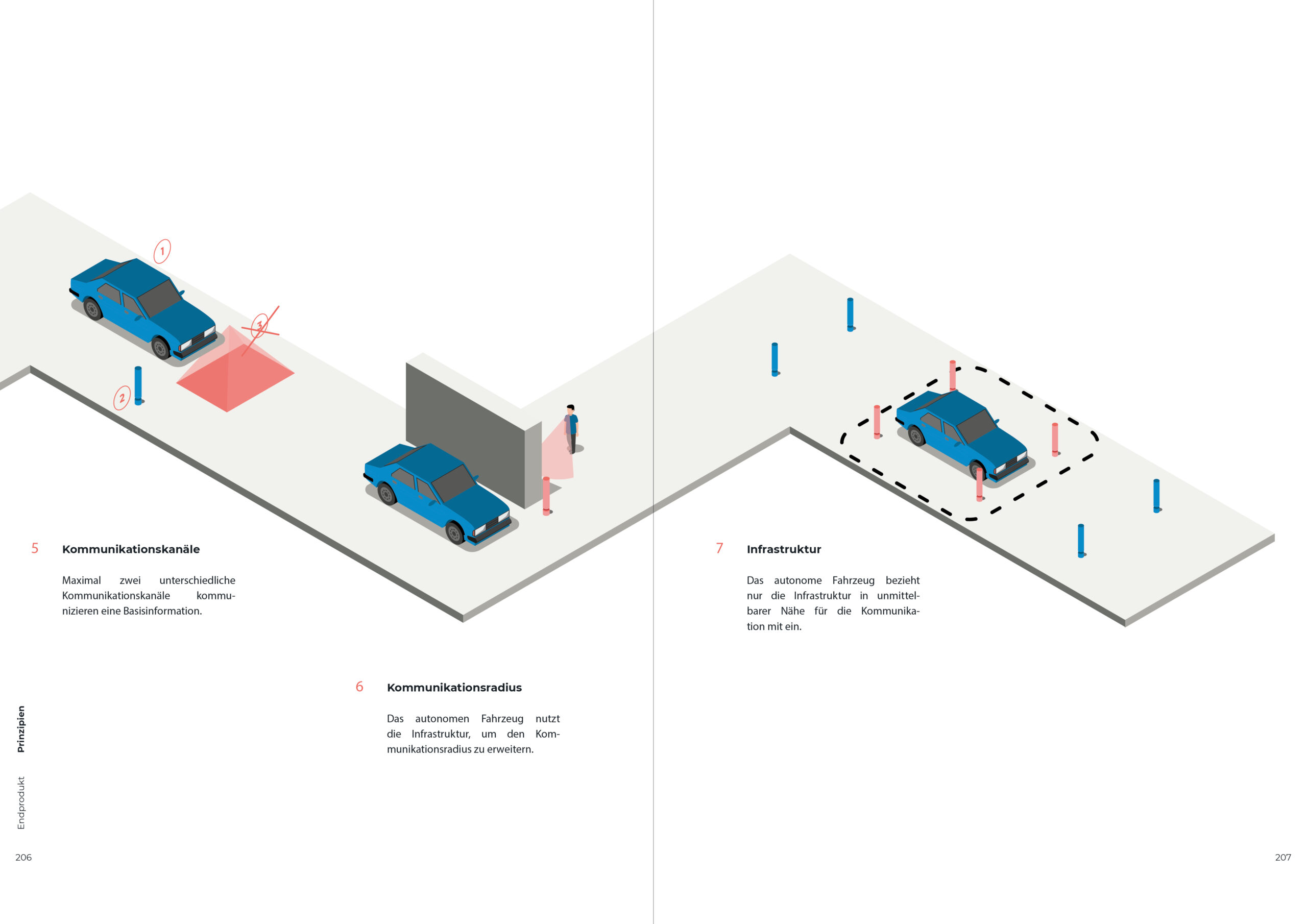
Eine Basisinformation soll über maximal zwei Kommunikationskanäle visualisiert werden.
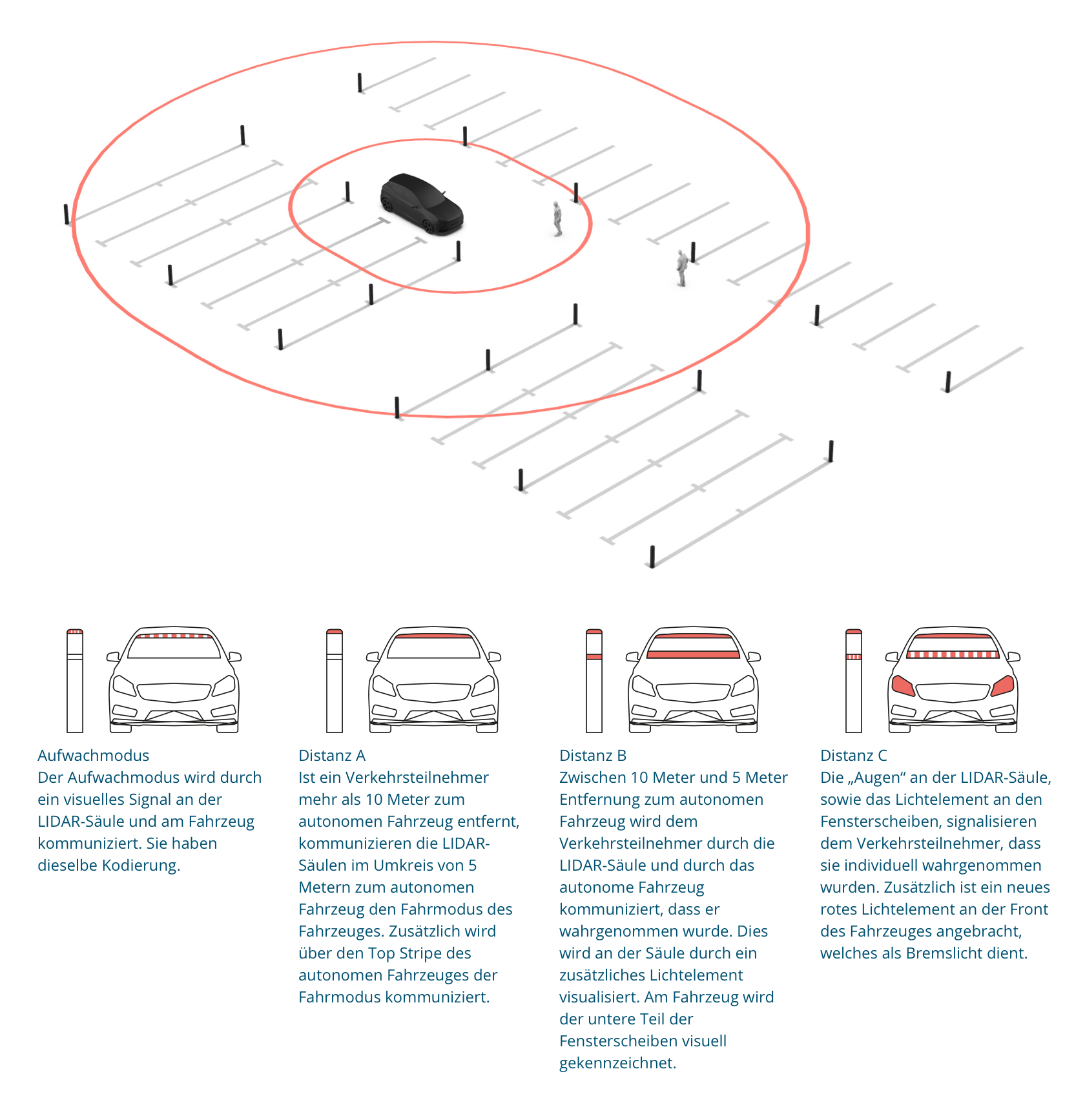
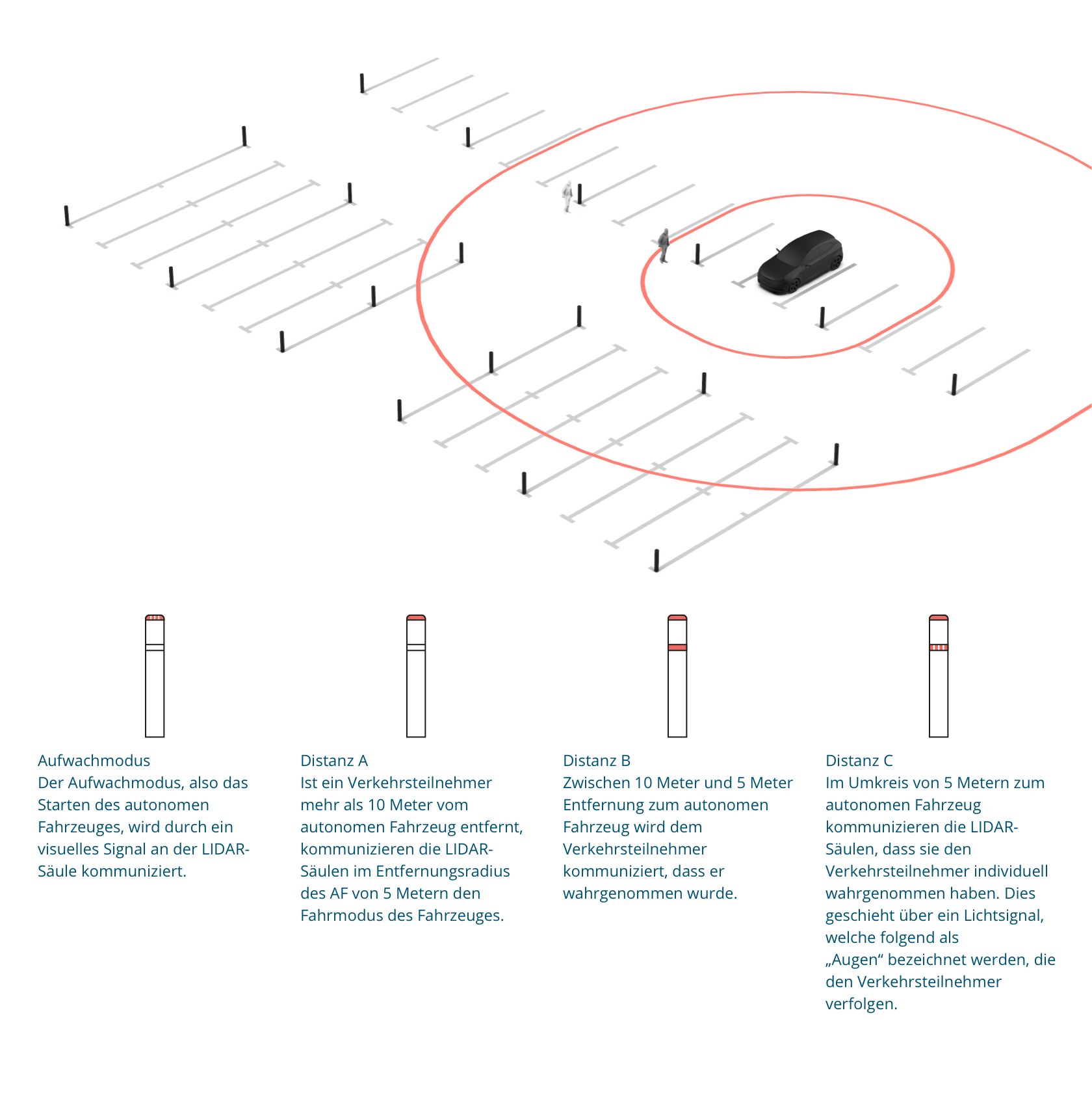
2
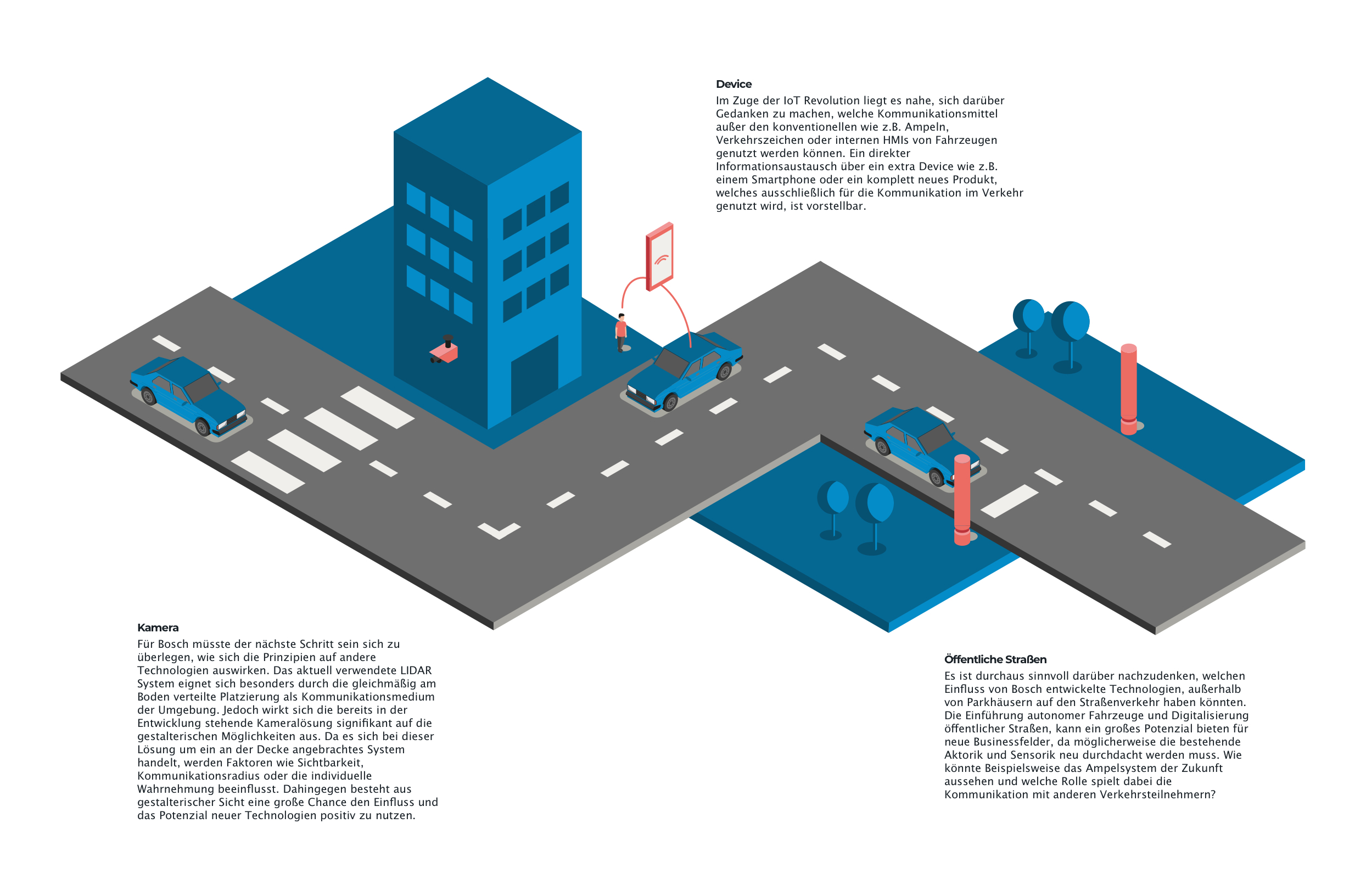
Die Infrastruktur muss miteinbezogen werden, um den Kommunikationsradius des Fahrzeuges zu erweitern. Wird ein Fahrzeug nicht direkt gesehen, besteht immer noch die Möglichkeit das Fahrzeug über die Infrastruktur bzw. LIDAR-Säulen wahrzunehmen.
3
Die Bremslichter an der Front des autonomen Fahrzeuges müssen synchron mit dem Fahrverhalten sein.
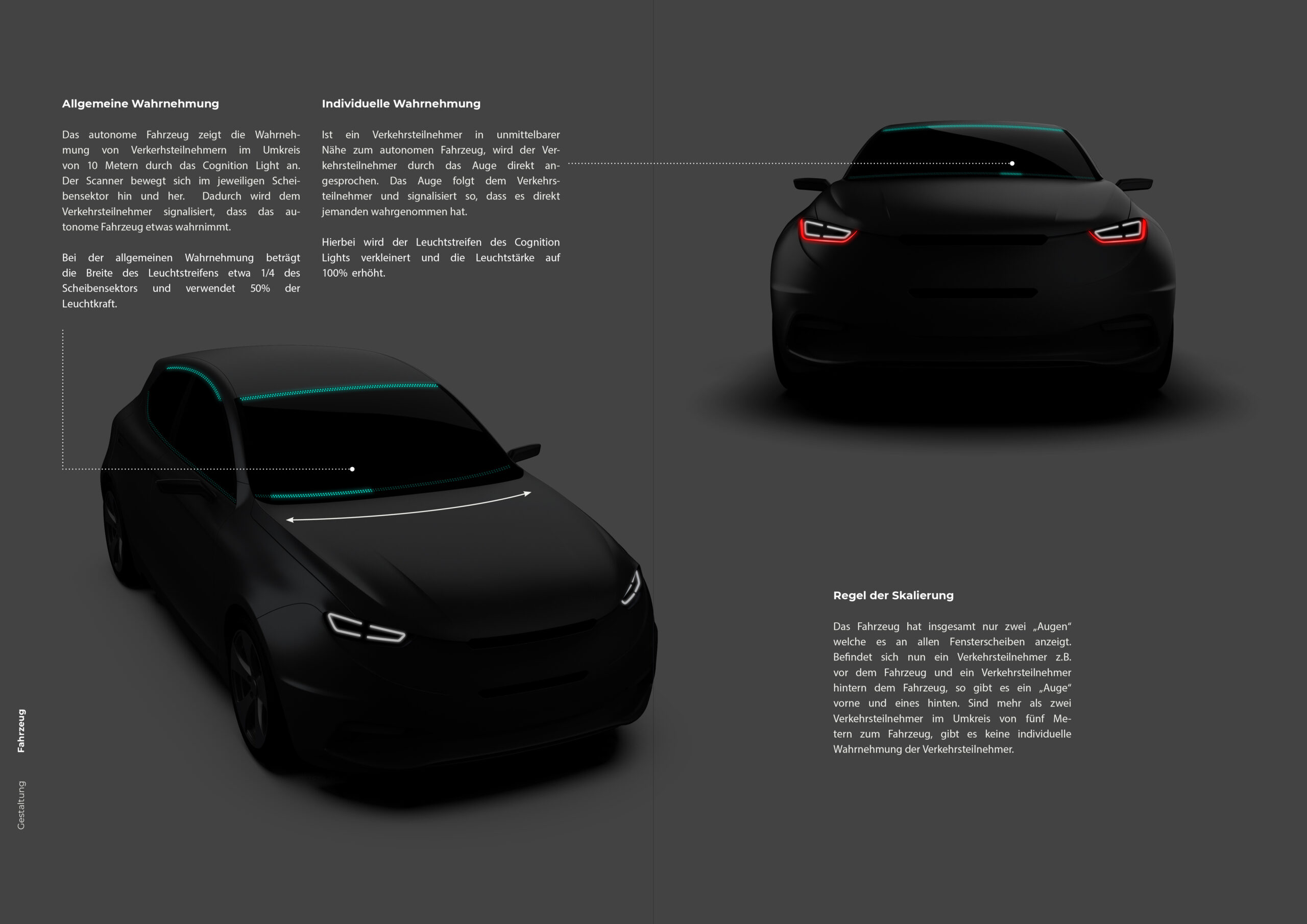
4
Eine individuelle Wahrnehmung wird von Verkehrsteilnehmern gefordert, um zu wissen was das Fahrzeug genau wahrgenommen hat. Dies fördert das Gefühl der Sicherheit.
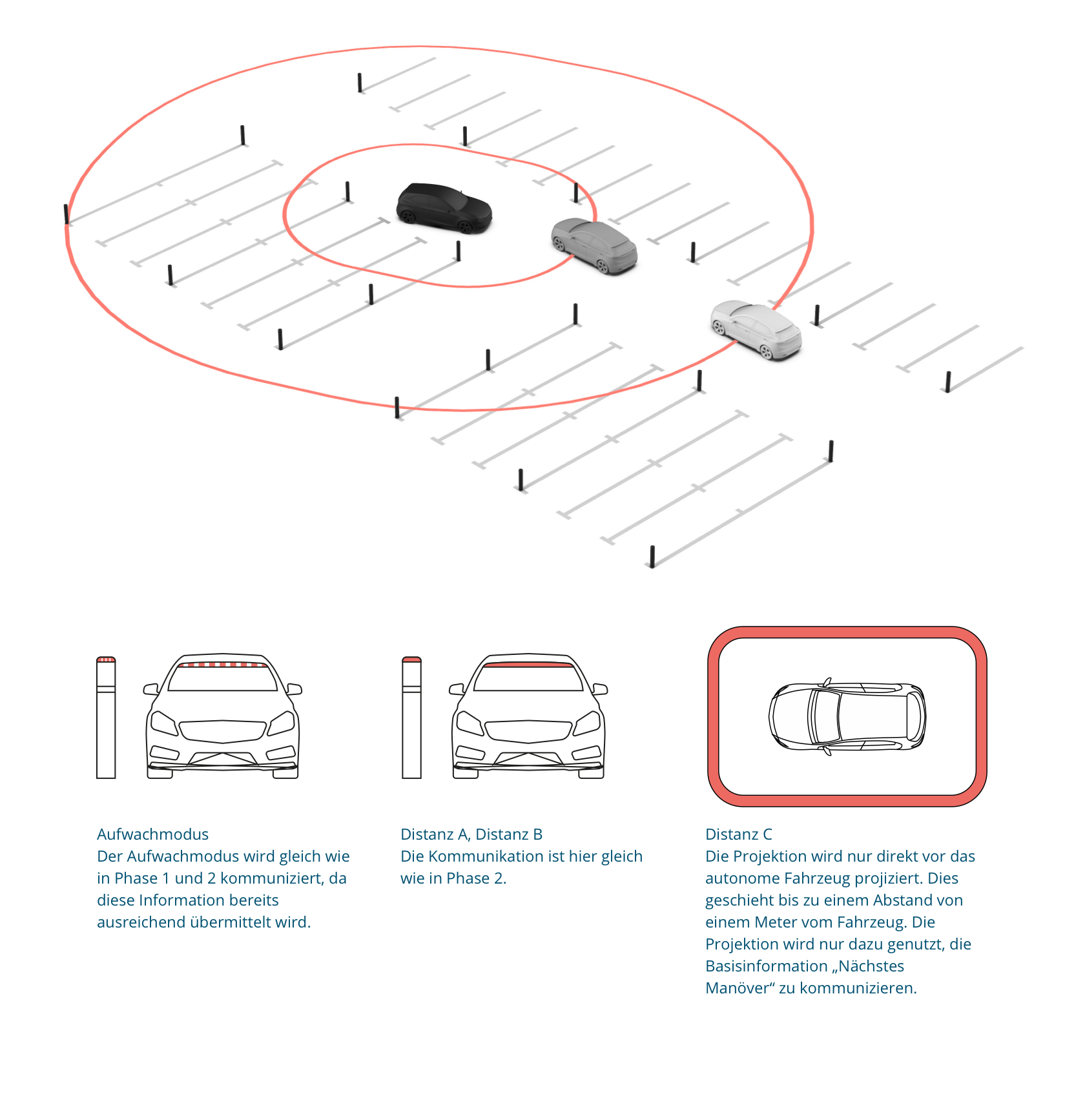
5
Projektionen sind dann hilfreich, wenn nicht klar ist, was das nächste Manöver des autonome Fahrzeuges ist.
6
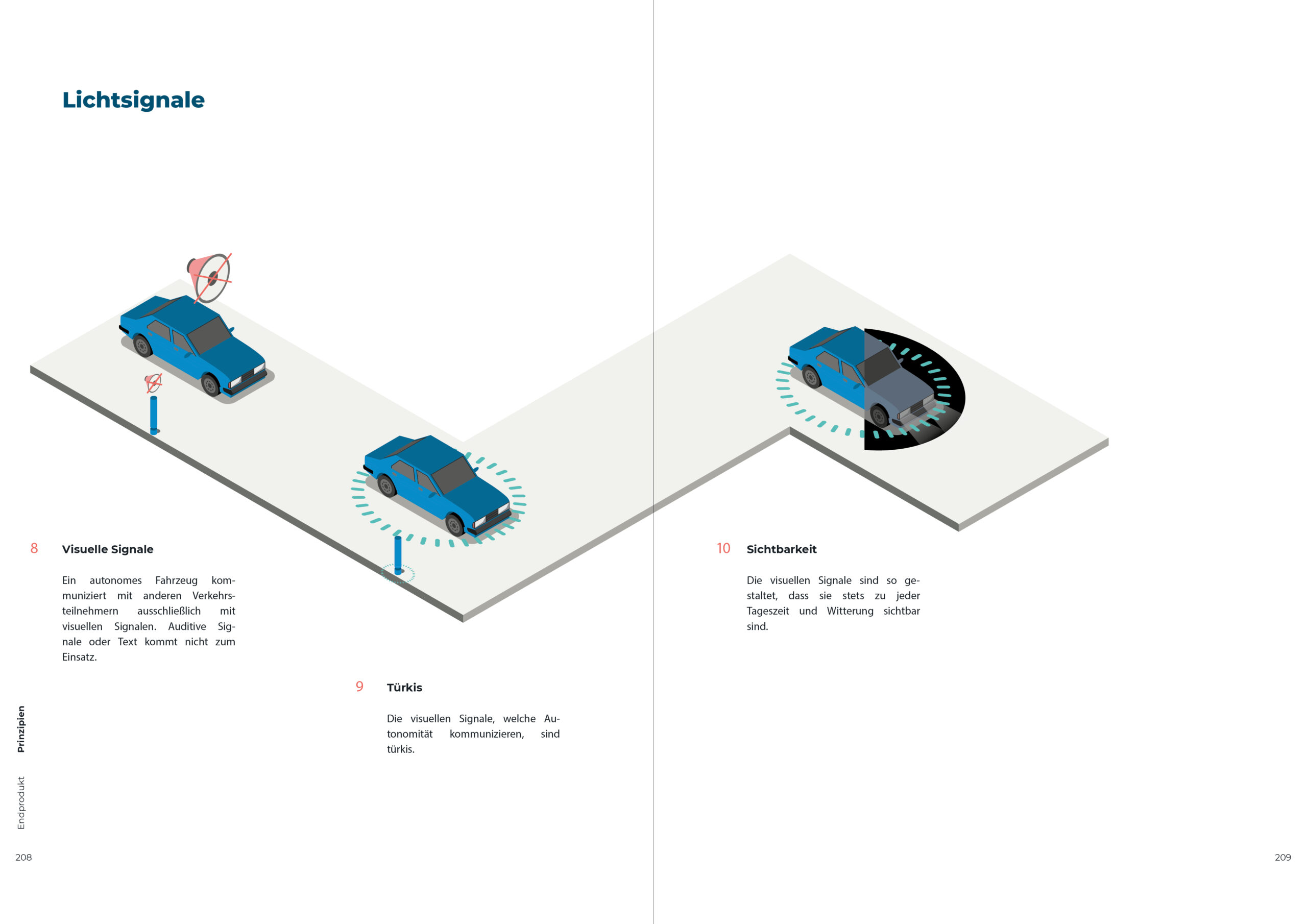
Die Verwendung der Farbe Türkis empfanden die meisten als angenehm, verständlich und gut sichtbar.
Gestaltung




Endprodukt
Die hier aufgelisteten Prinzipien basieren auf der bisherigen Recherche sowie dem Testing von getroffenen Annahmen. Die Prinzipien gelten für den Niedriggeschwindigkeitsbereich (unter 20 km/h) und im Kontext eines Parkhauses.
Insgesamt sind die Prinzipien in sieben Kategorien geclustert:
- Allgemein
- Lichtsignale
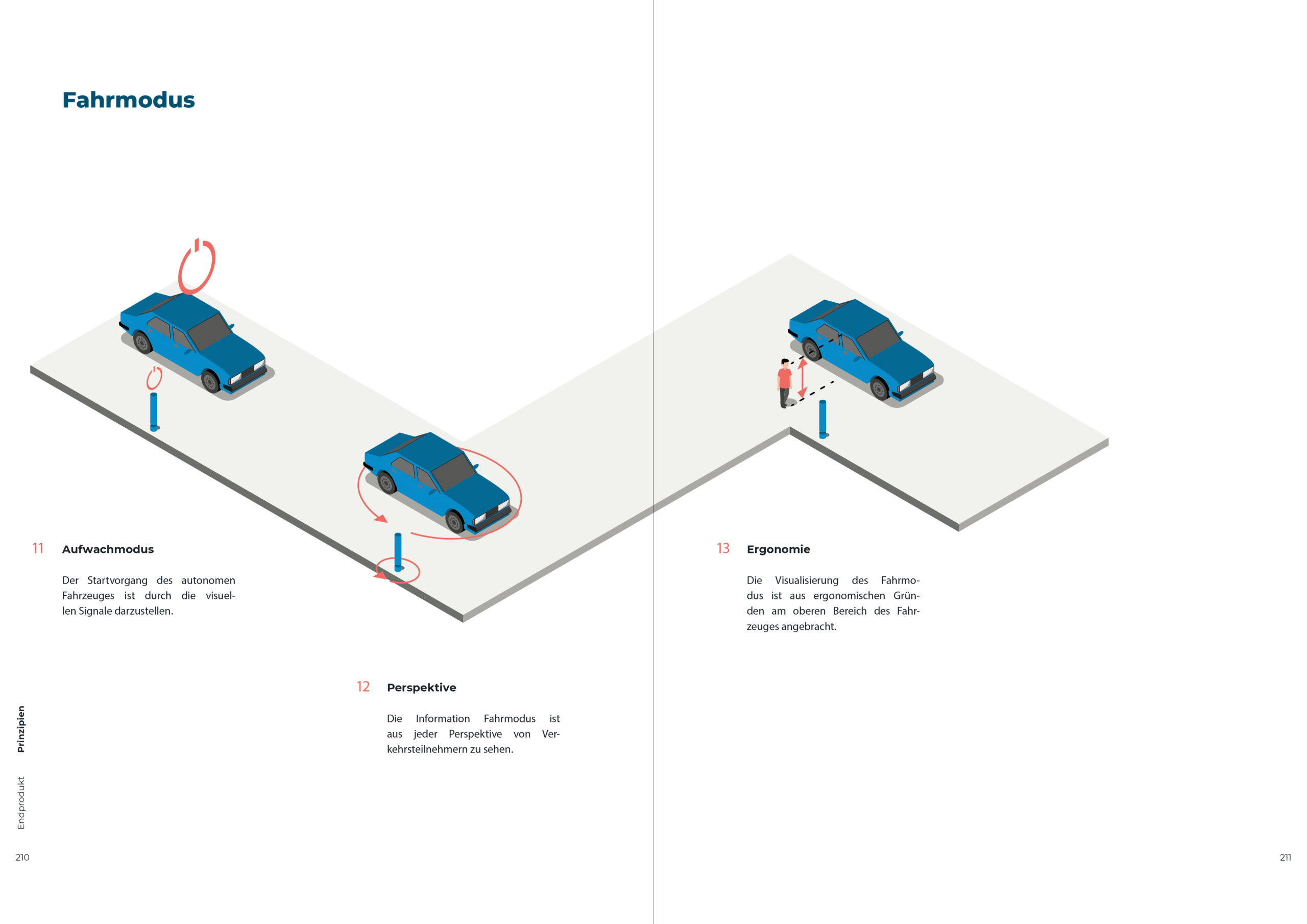
- Fahrmodus
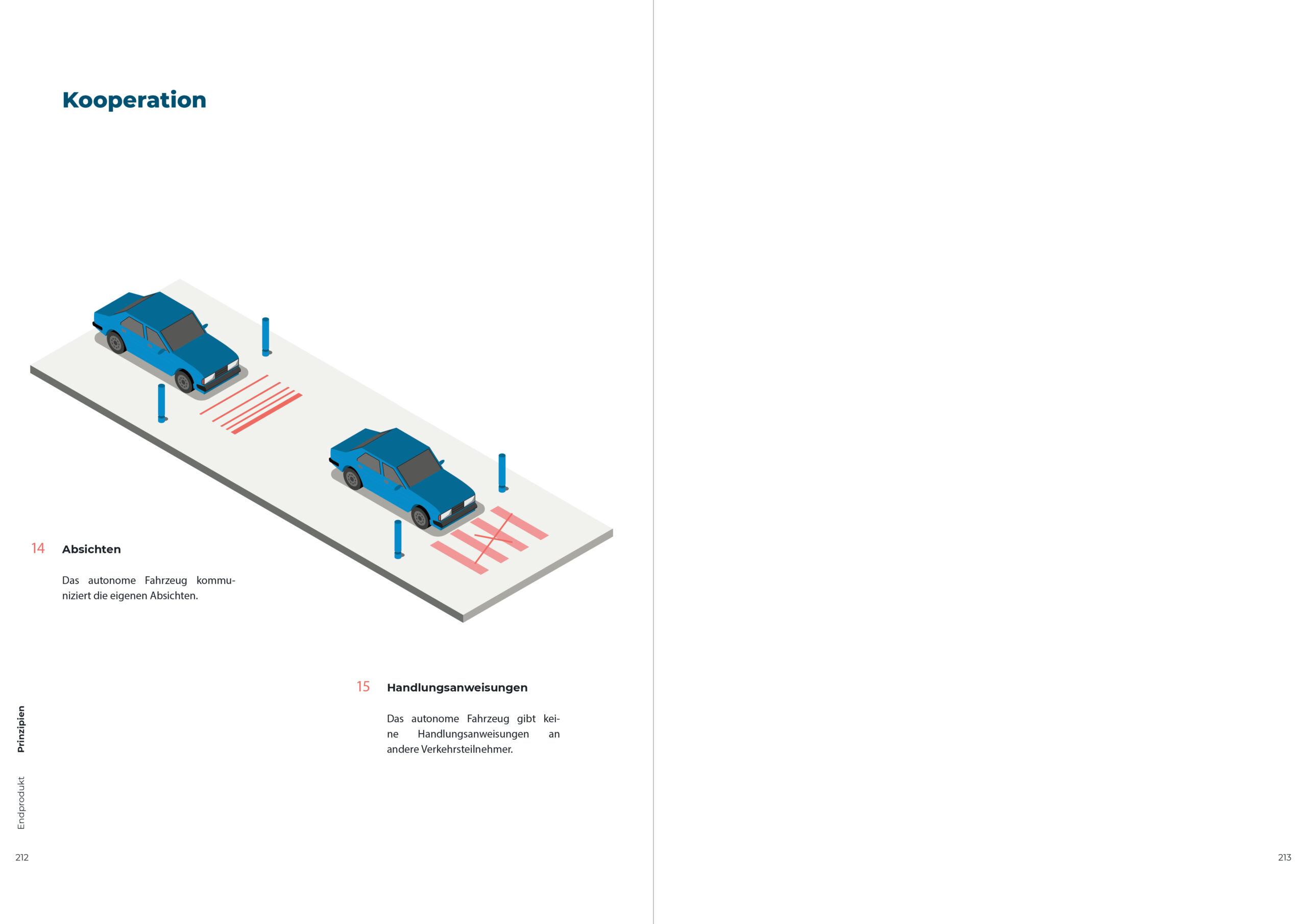
- Kooperation
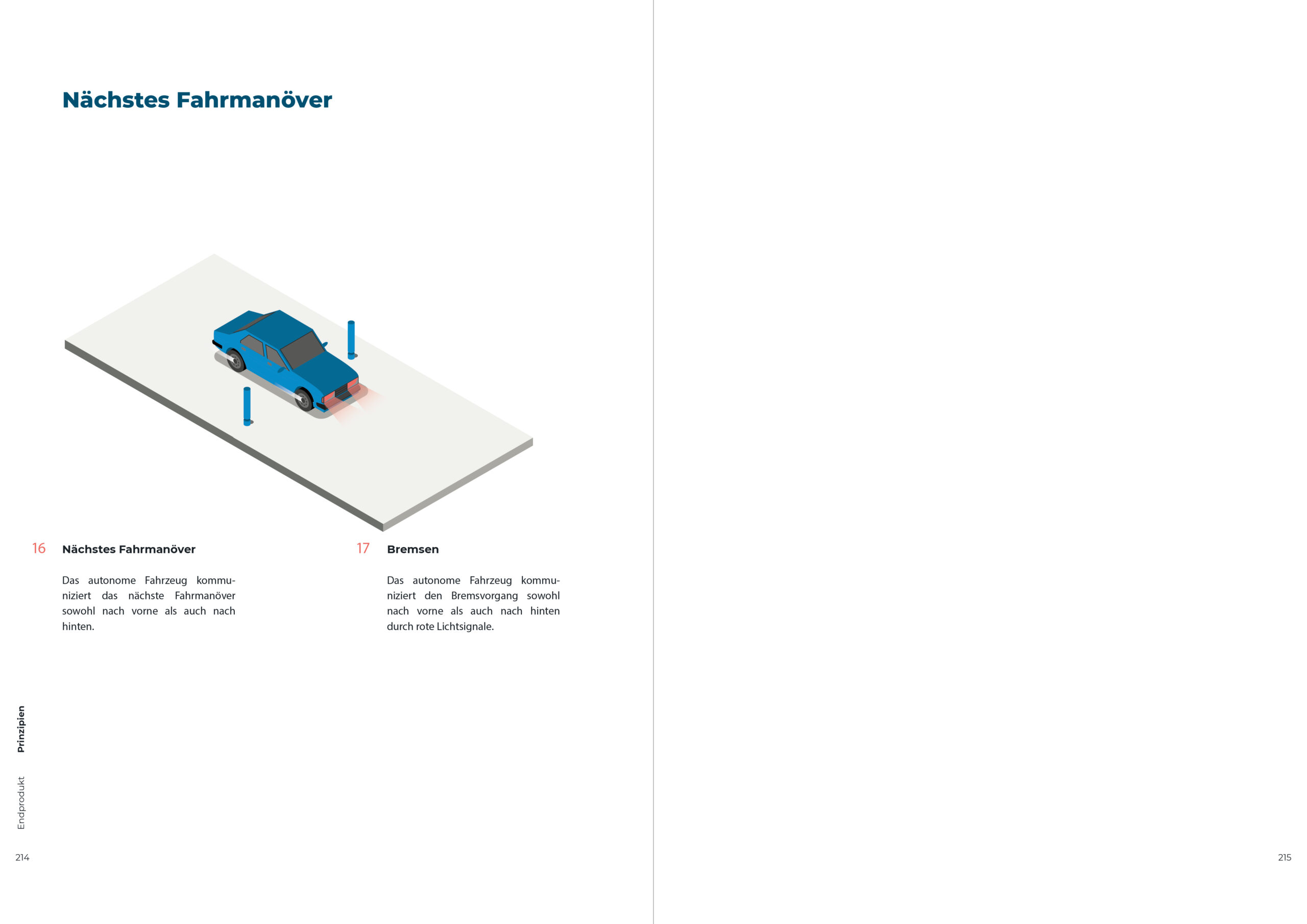
- Nächster Fahrmanöver
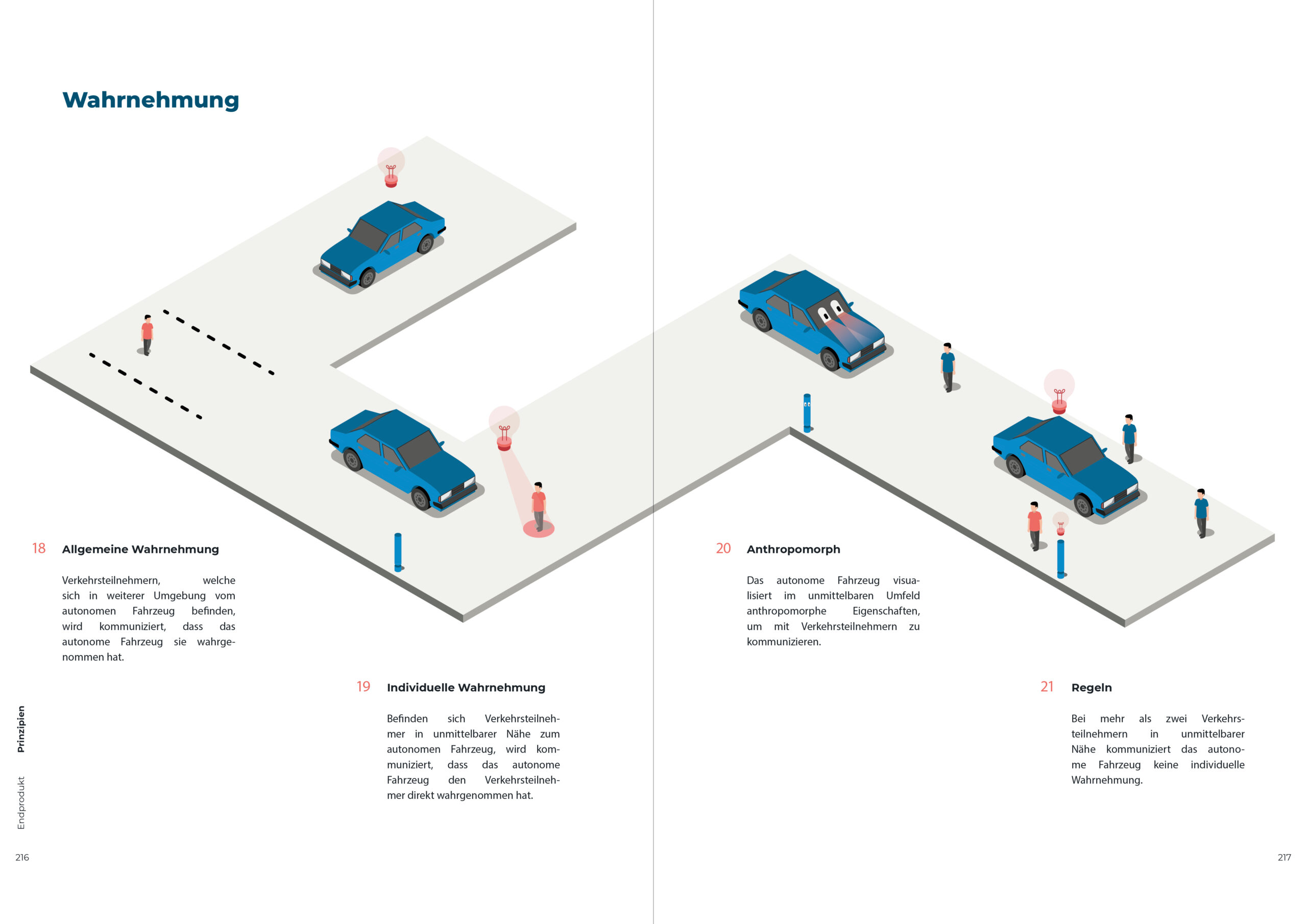
- Wahrnehmung
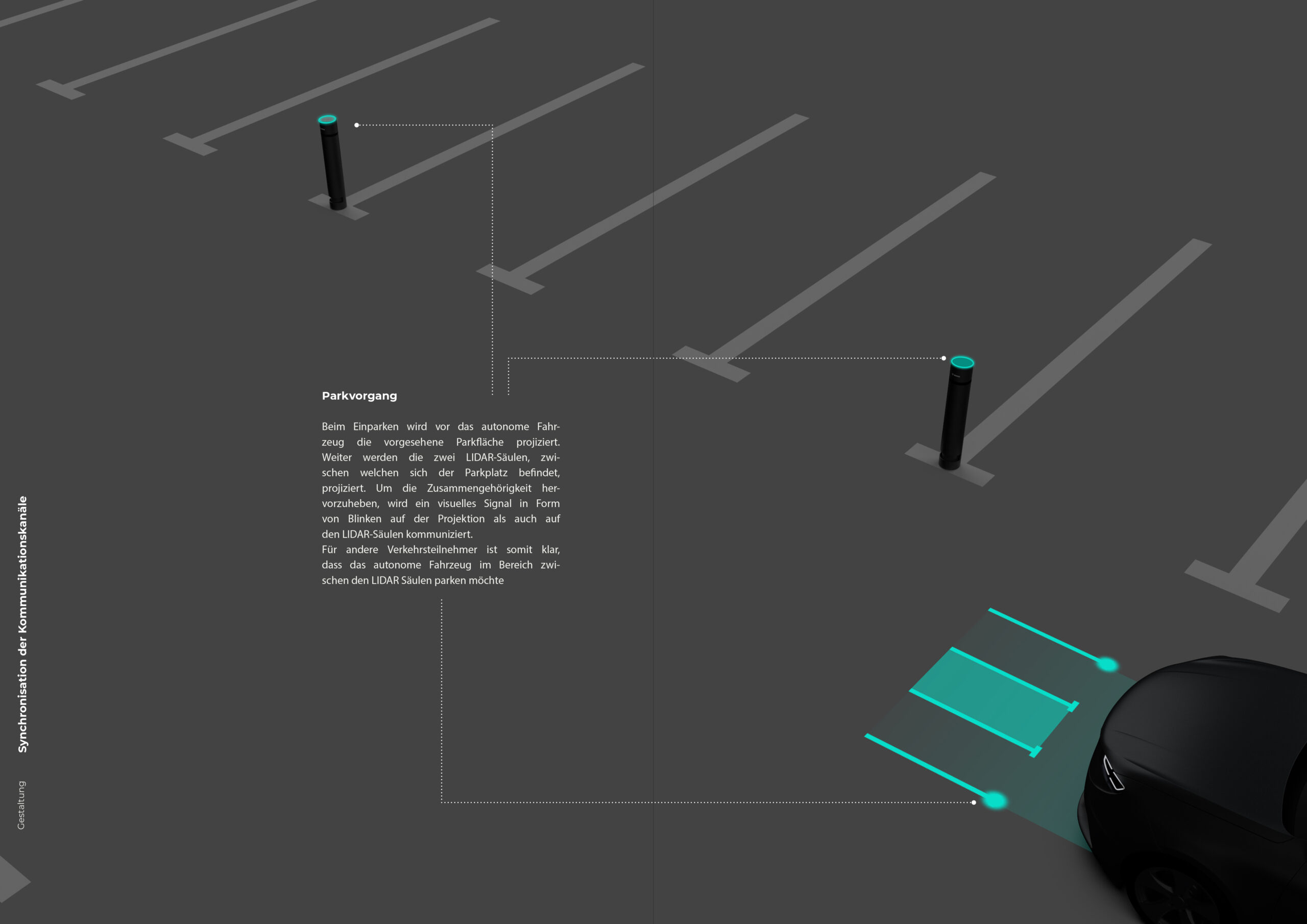
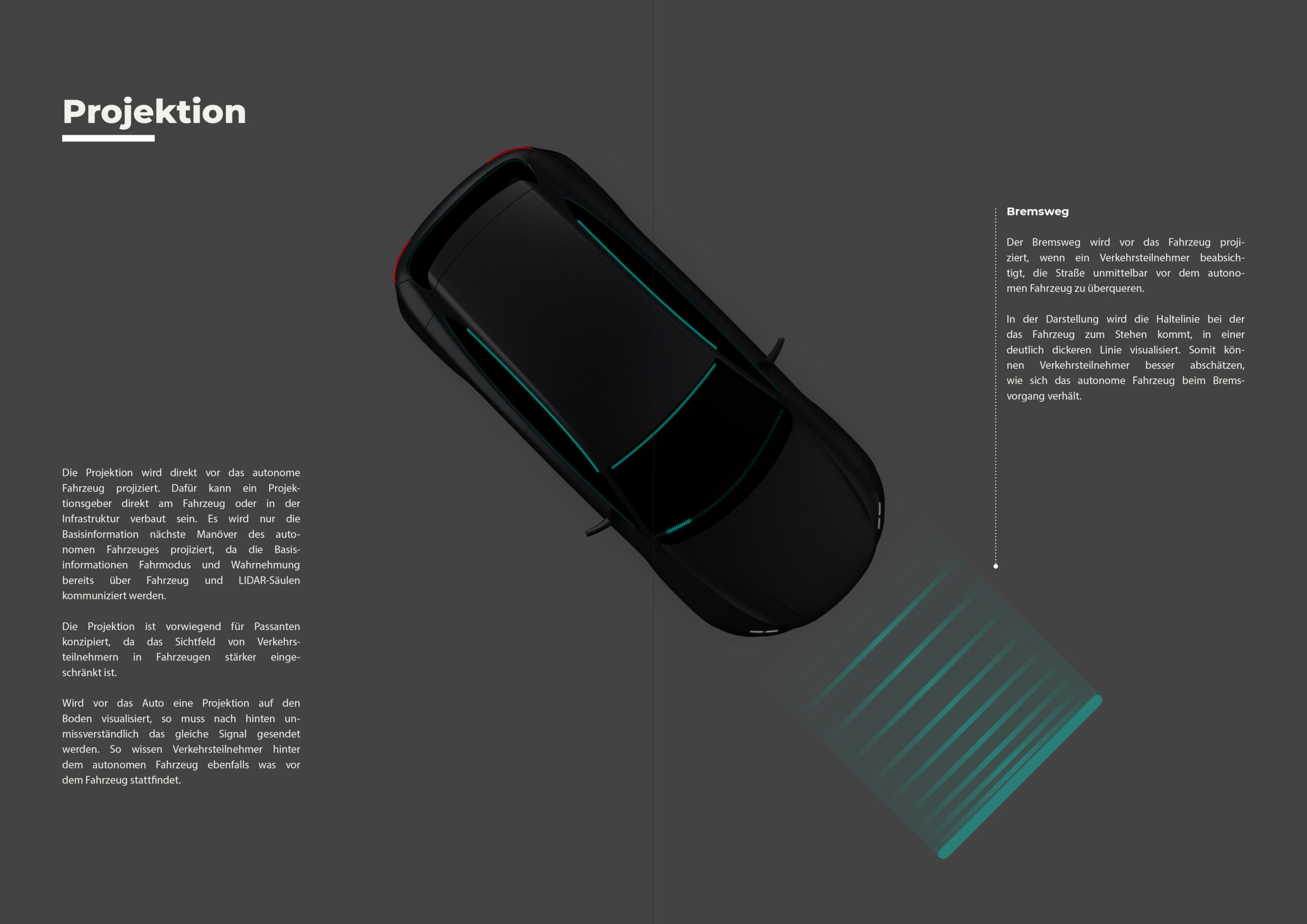
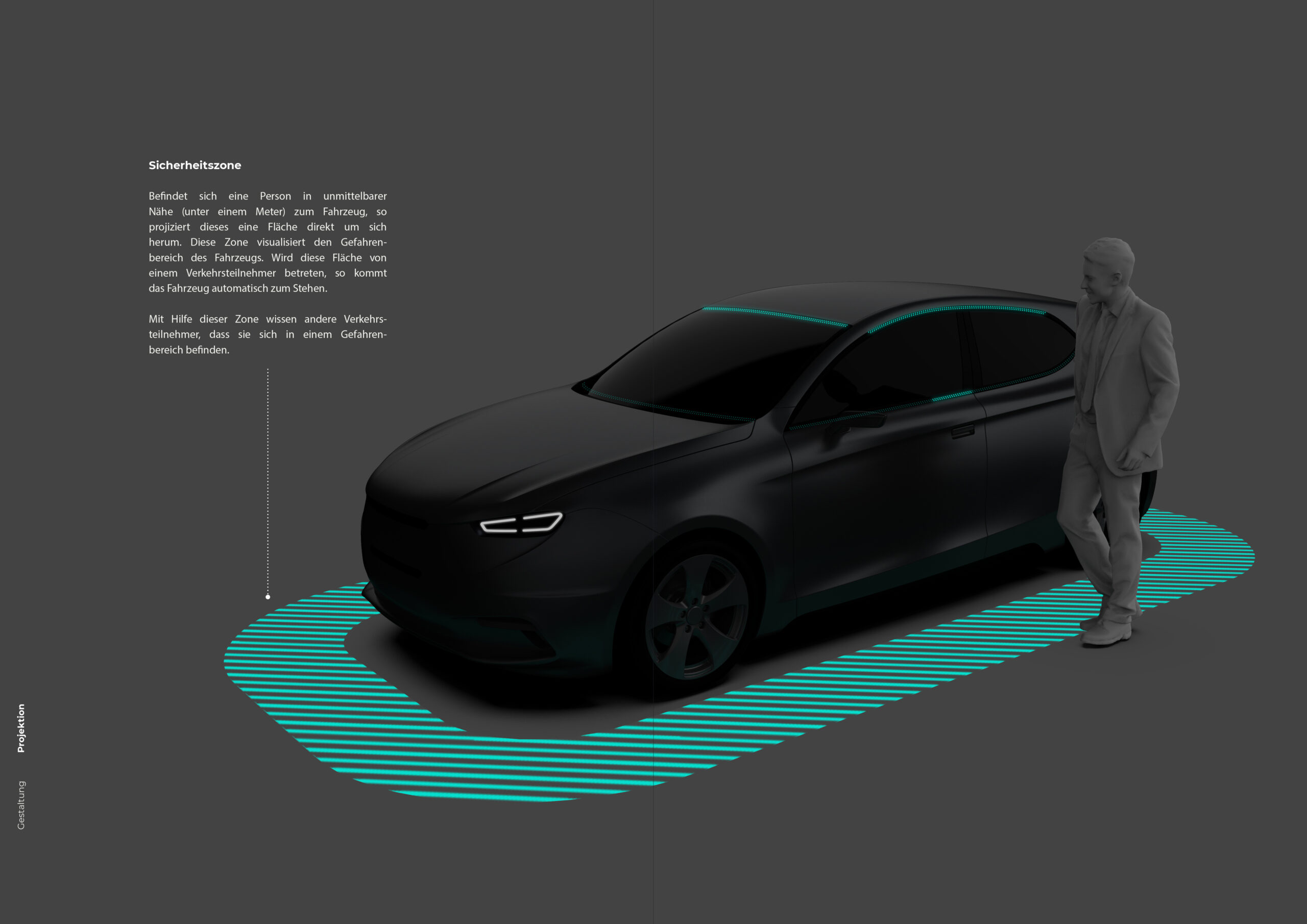
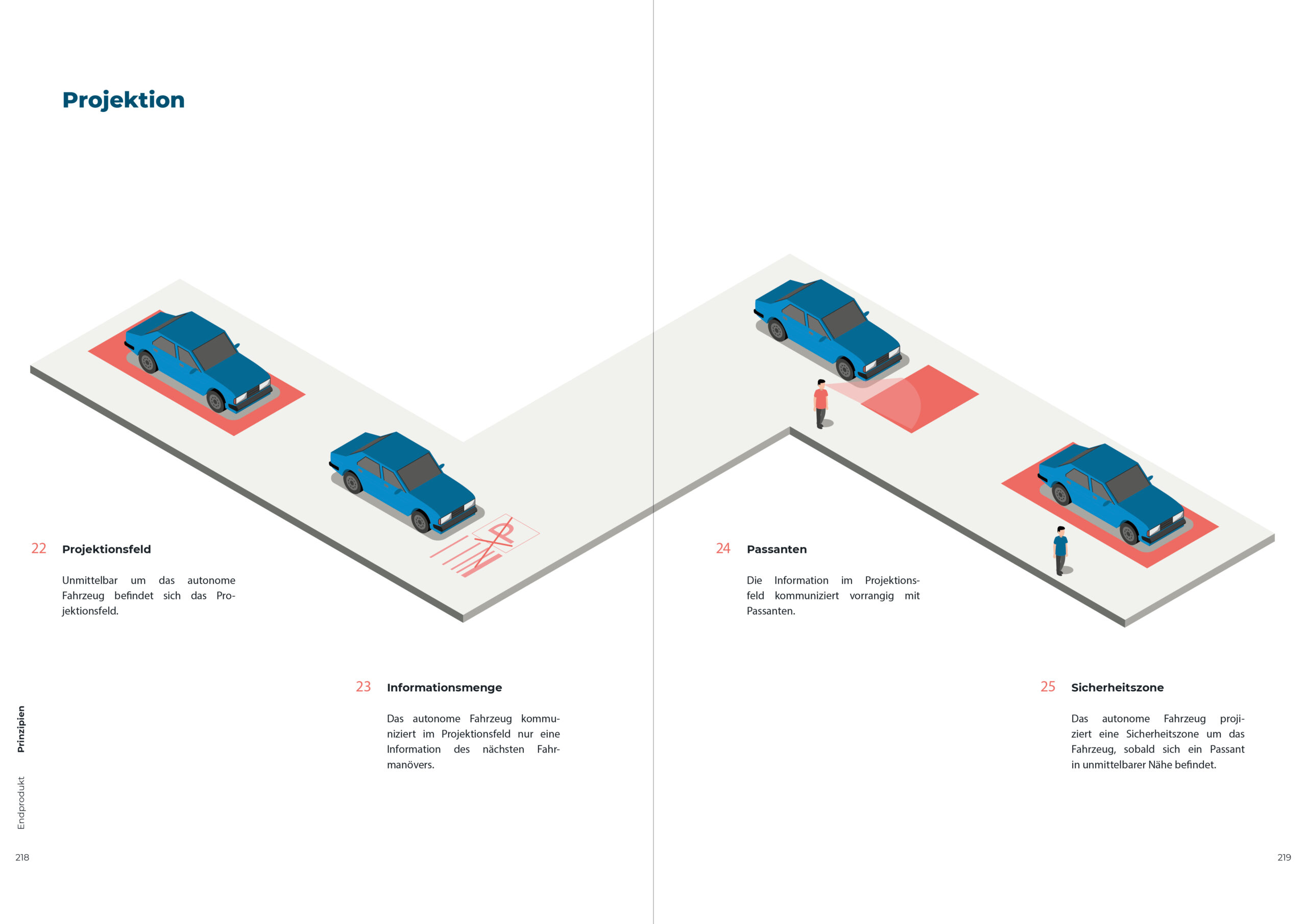
- Projektion
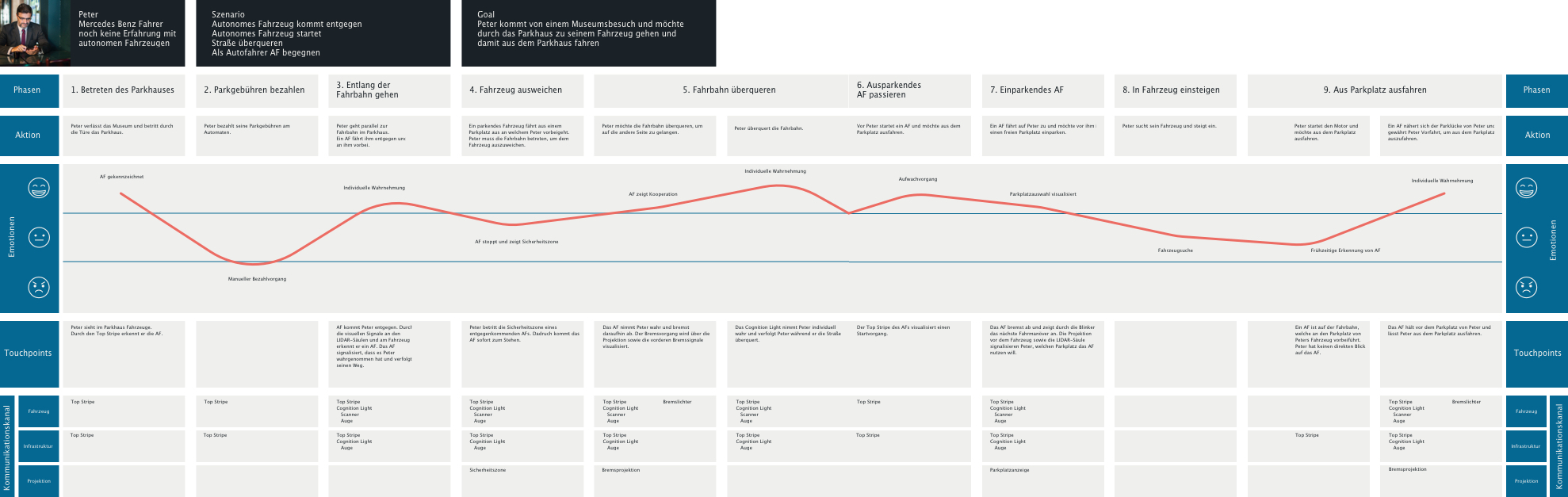
User Journey mit den erstellten Prinzipien
Prototyping



Ausblick
Um das Projekt HAVI weiter bei unserem Kooperationspartner treiben zu können, haben wir noch einen Ausblick gegeben, welche Themengebiete noch relevant sein können und woran weiter gearbeitet werden sollte.
Credits
Marco Stölze
Robert Bosch Gmbh Connected Mobility Solutions (CS)
HfG Schwäbisch Gmünd, Strategic Design M.A.
Contact
Kevin Bareiss
Stuttgart, Germany
Email: hello@kevinbareiss.com
LinkedIn: Kevin Bareiss
© Kevin Bareiss 2021